Overview
Beginning on September 9th, 2023 I chose to be on FTC team 9384. The following months consisted of building a robot to play the 2023-2024 FTC game CENTERSTAGE. This game consisted of placing thin hexagonal "pixels" inside of a tilted, oversized, Plinko board and taped off section on the playing field. Depending on where your robot places the pixels and how many you place, a set amount of points will be given to that robot's alliance. Once the match is over, bonuses are given out depending on whether the robot completed certain tasks properly. During the 30 second endgame period, robots have 3 optional side objectives. They include climbing on the trusses of the center stage and shooting a paper airplane onto taped off sections outside the field from behind the truss. During this build season, our robot went through 4 major iterations. The final CAD of the robot can be found by clicking the GrabCAD icon below. The engineering portfolio and notebook can be found on the GitHub page linked below.
This project is finished

September 9th 2023 - December 9th 2023
(Kickoff - Qualifier 2)
Robot Sub-Systems
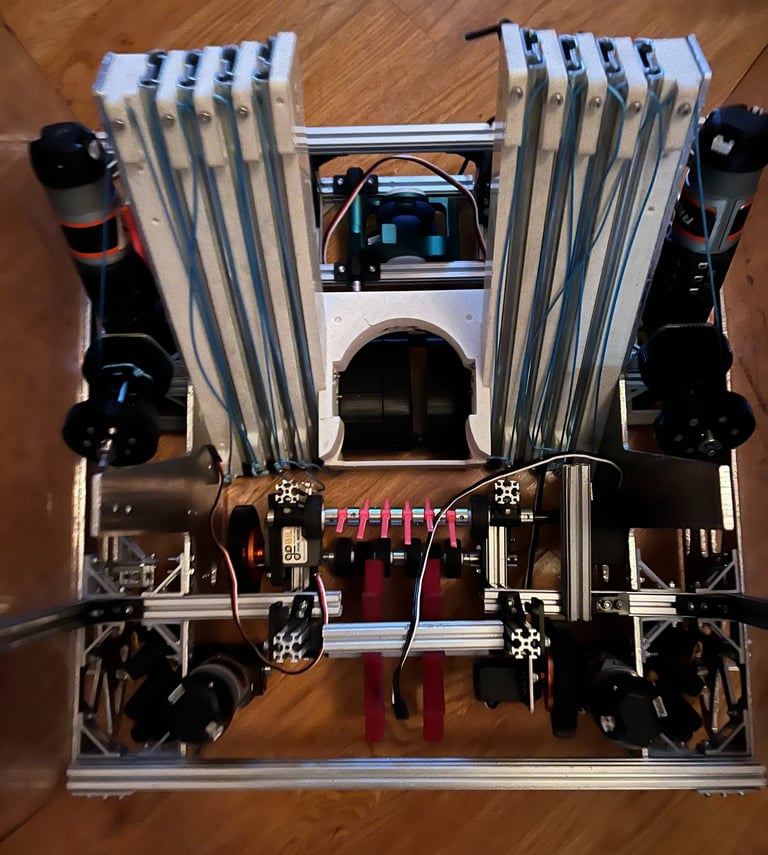
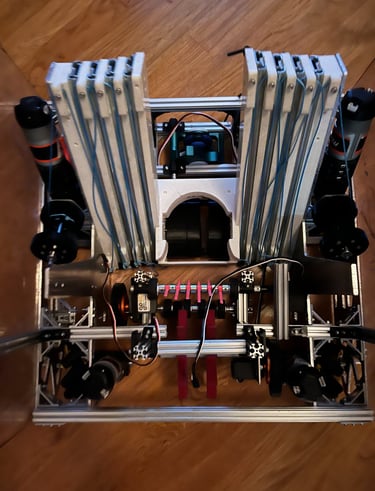
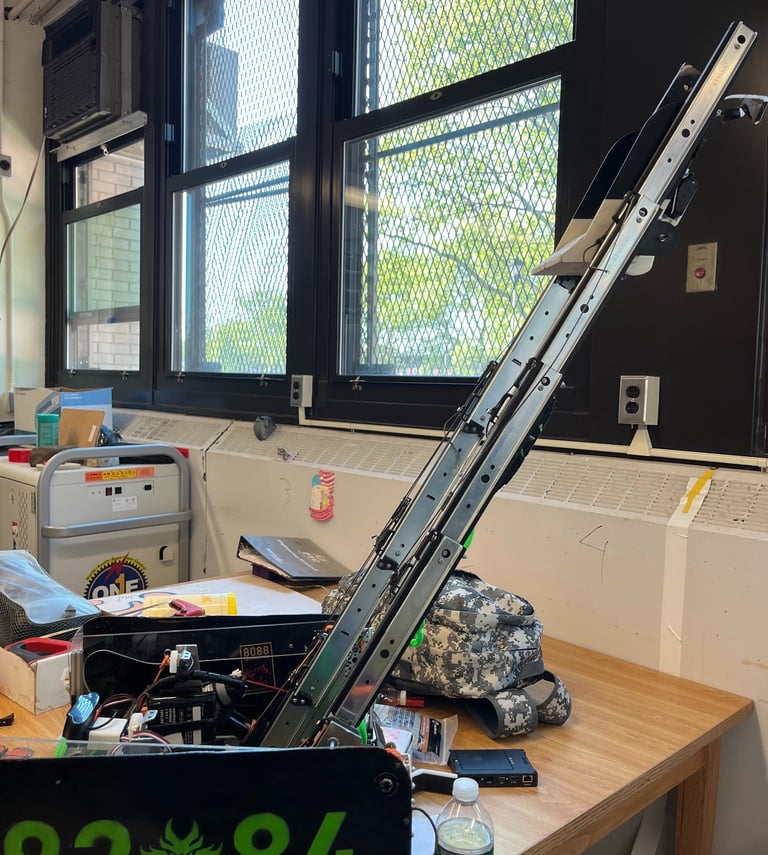
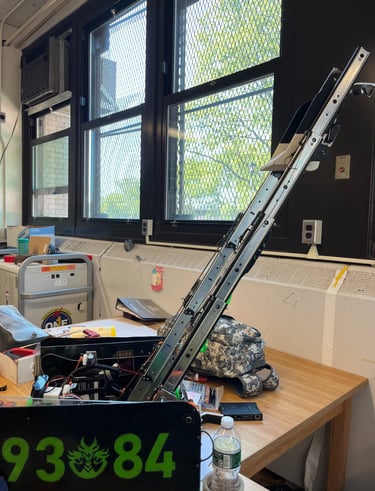
Linear Slides
Due to this year's game having an extremely tall, tilted board to score on, we decided to use linear slides to score on any position on the board. We used standard drawer slides stacked against each other between 3d printed parts. The 3d printed parts acted as spacers and pullies for the drawer slides to lift upwards and downwards depending on which way the motor pulls the string.
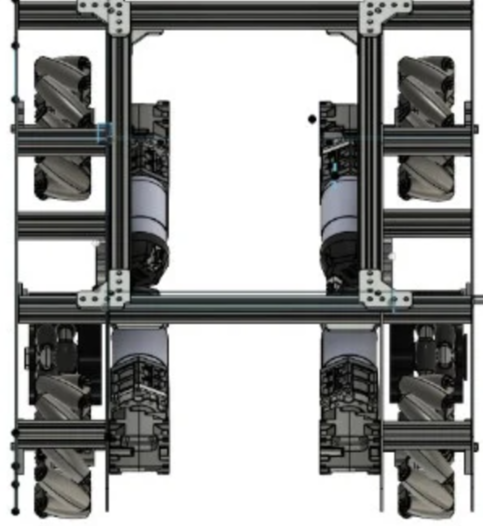
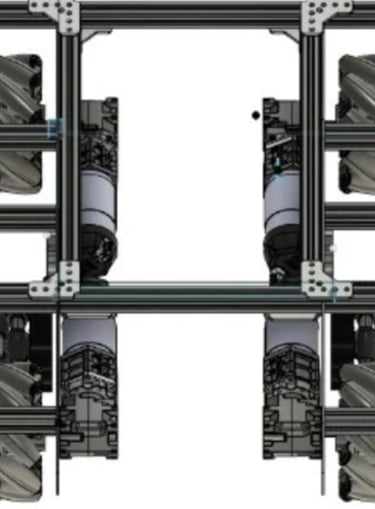
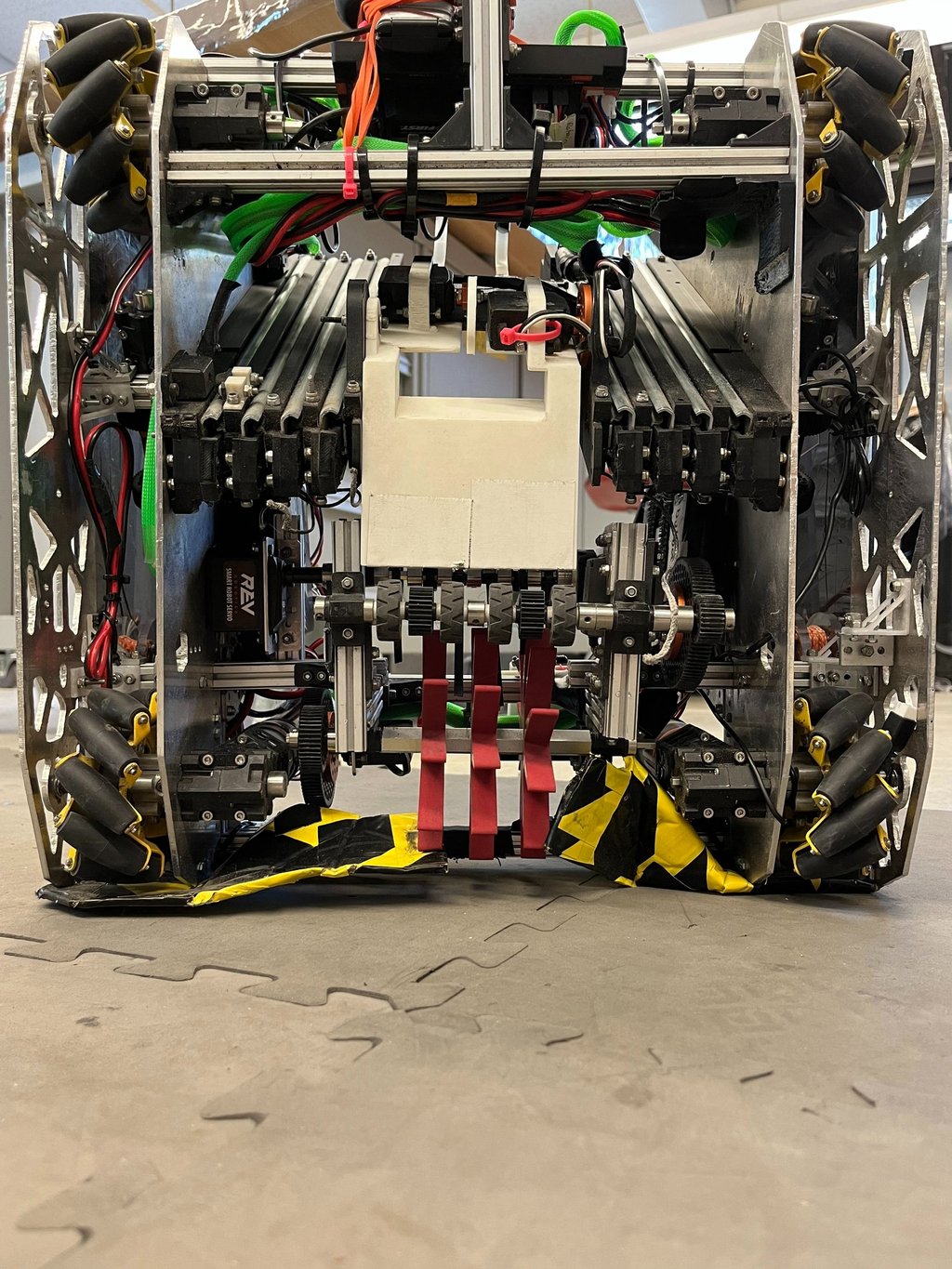
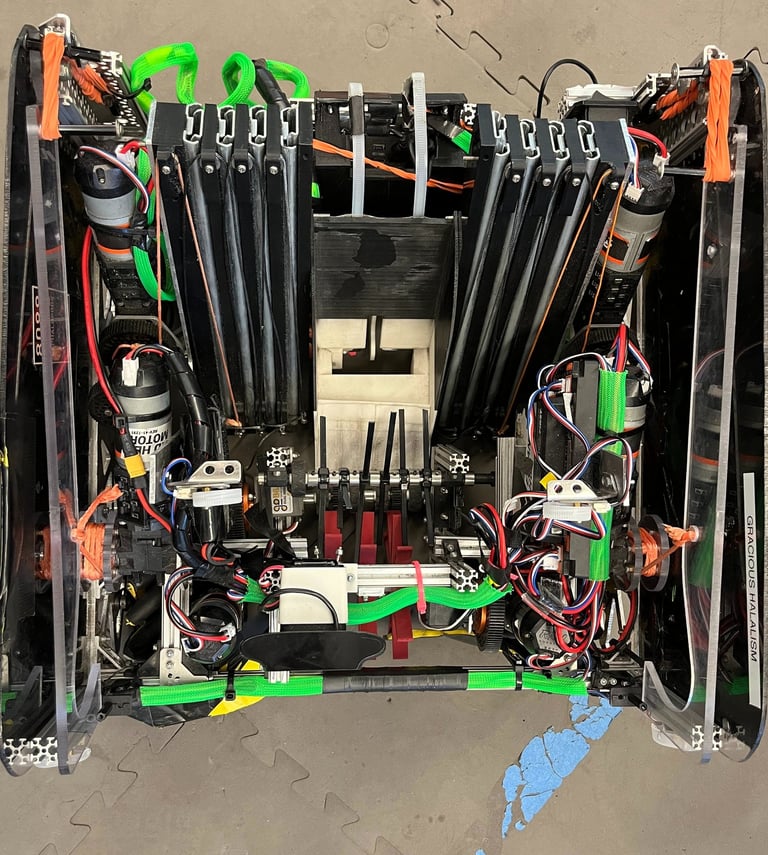
Chassis
The robot's chassis is complicated because it is made of aluminum sheets cut to the dimensions we wanted. The drive base is a standard mecanum drive but the chassis is made up of 4 plates parallel to each other. There are mounting holes and cutouts for each mechanism and extrusions to support the chassis.
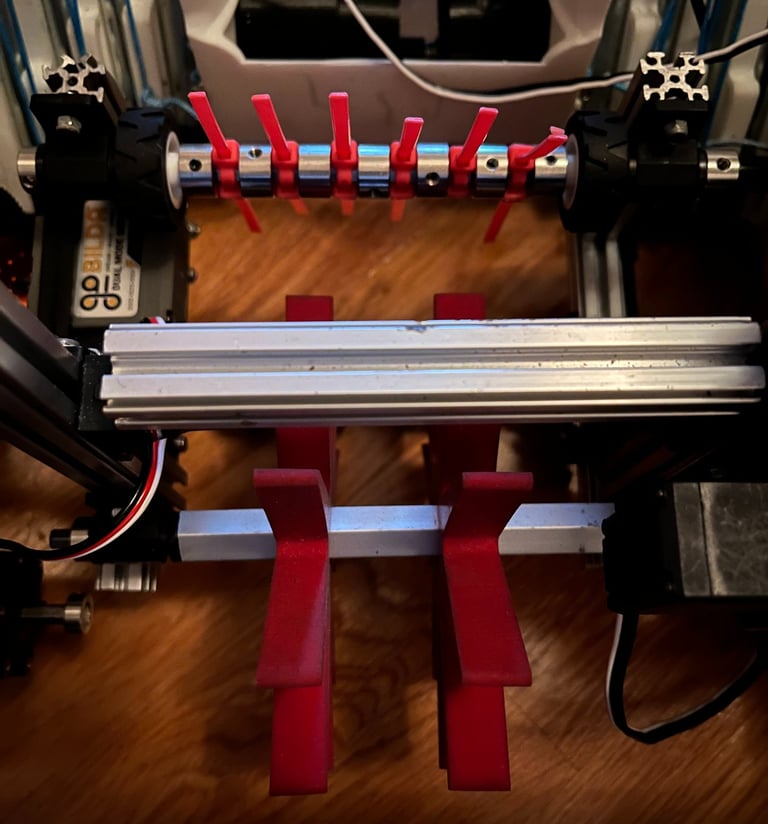
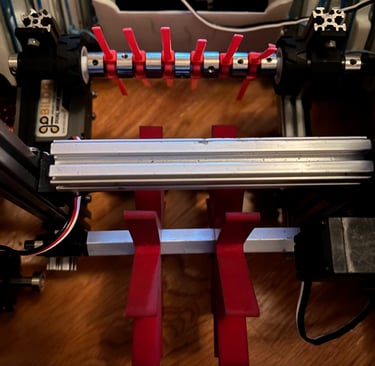
Intake
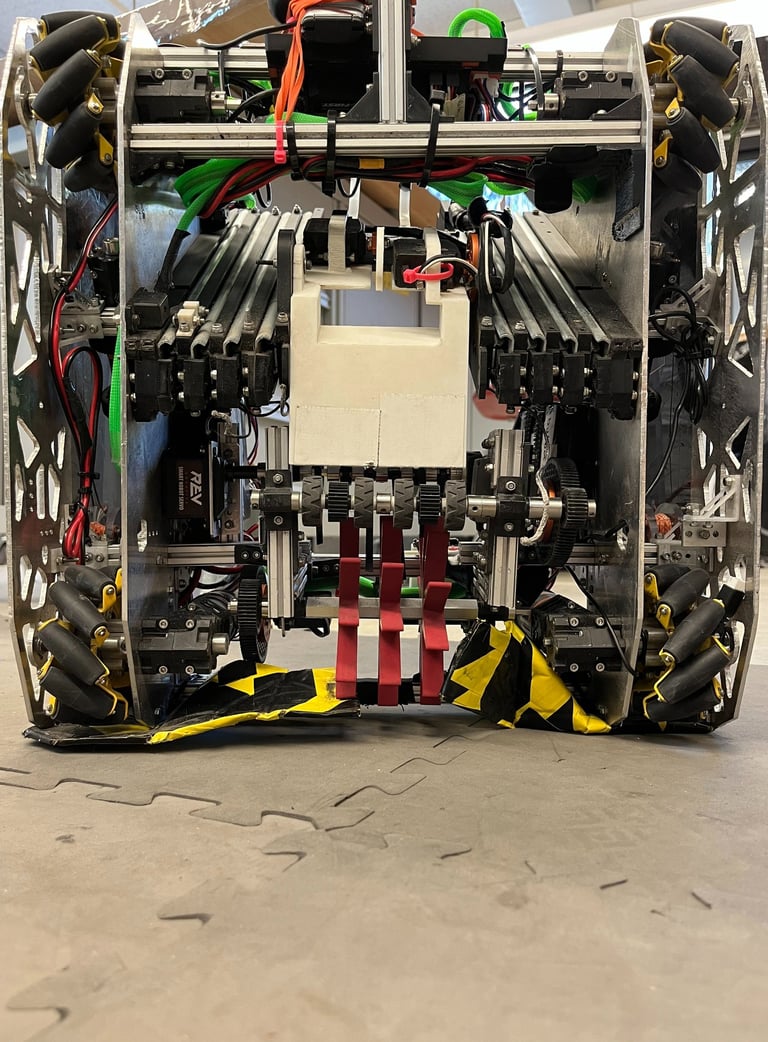
Due to being able to hold 2 pixels inside of a robot at a time, we opted for an active intake with 3 sections of wheels to allow multiple pixels to be taken in quickly. The set of star wheels grips and pushes the pixel into a set of counter rollers, when rotating together the 2 sets of wheels push the pixel into the robot. A third set of zip ties allows the robot to brush the pixel into our outtake mechanism.
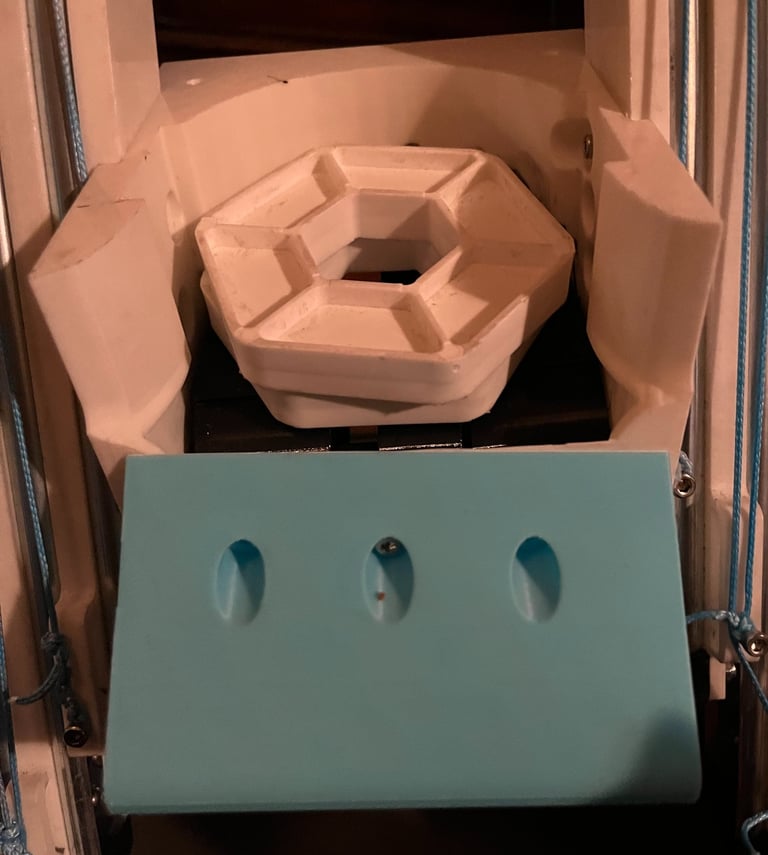
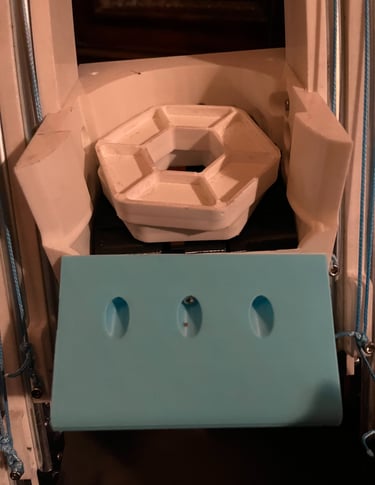
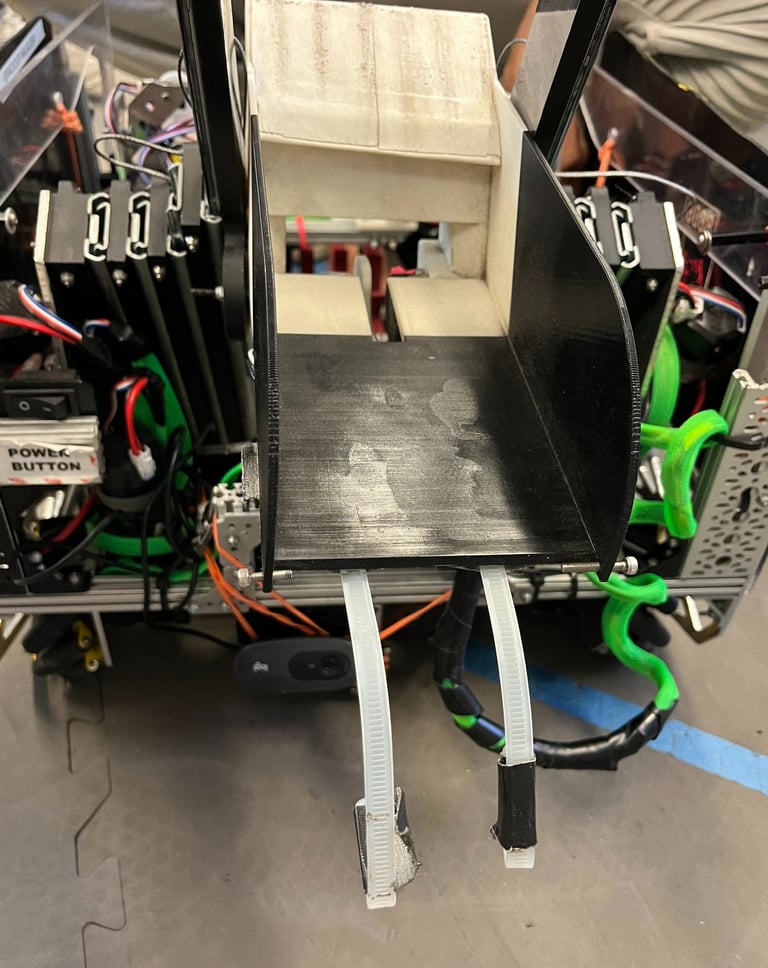
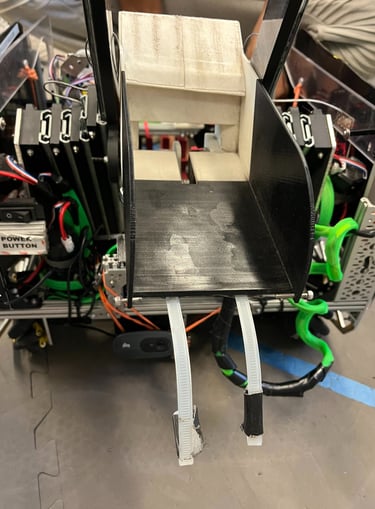
Outtake
When designing our outtake we wanted it to work quickly and accurately. To do this, we created a box that could hold the pixels and used 3D printed rubber belts to push out the pixels when we wanted to outtake. The major flaw with this design is that it was unable to drop the pixel on the angle that we needed for it to score on the backdrop.
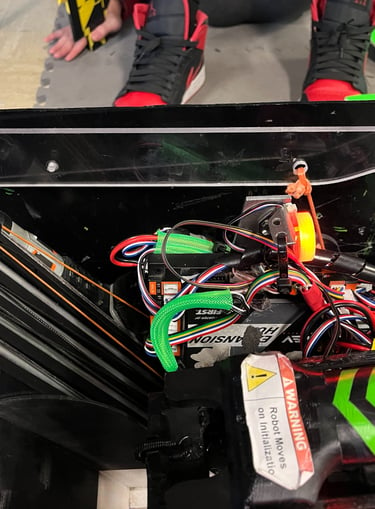
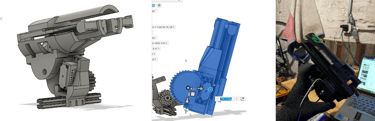
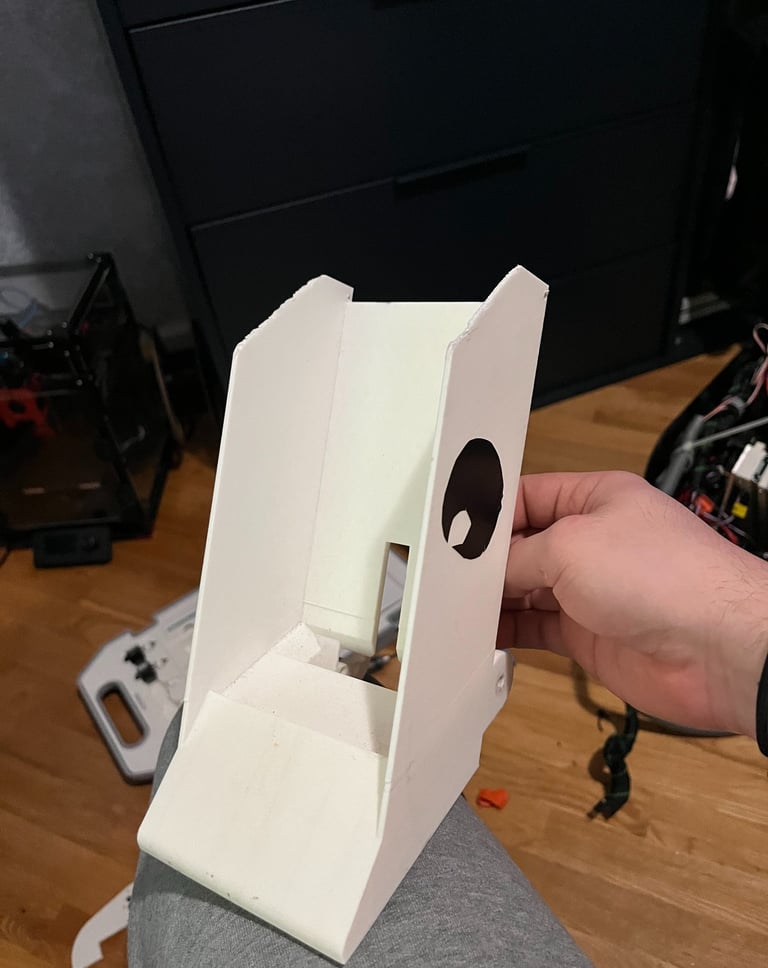
Plane Launcher
Due to our robot needing to shoot a paper airplane, we decided to create a launcher that uses a spring to shoot the plane out of the launcher's case. The launcher is operated by one servo to release the spring and another servo to rotate the launcher in an upward position to the perfect angle for us to fire the plane.
December 9th 2023 - January 13th 2023
(Qualifier 2 - Qualifier 4)
Robot Sub-Systems
Linear Slides
The robot's Linear Slides were kept the same.
Intake
The robot's Intake was kept the same.
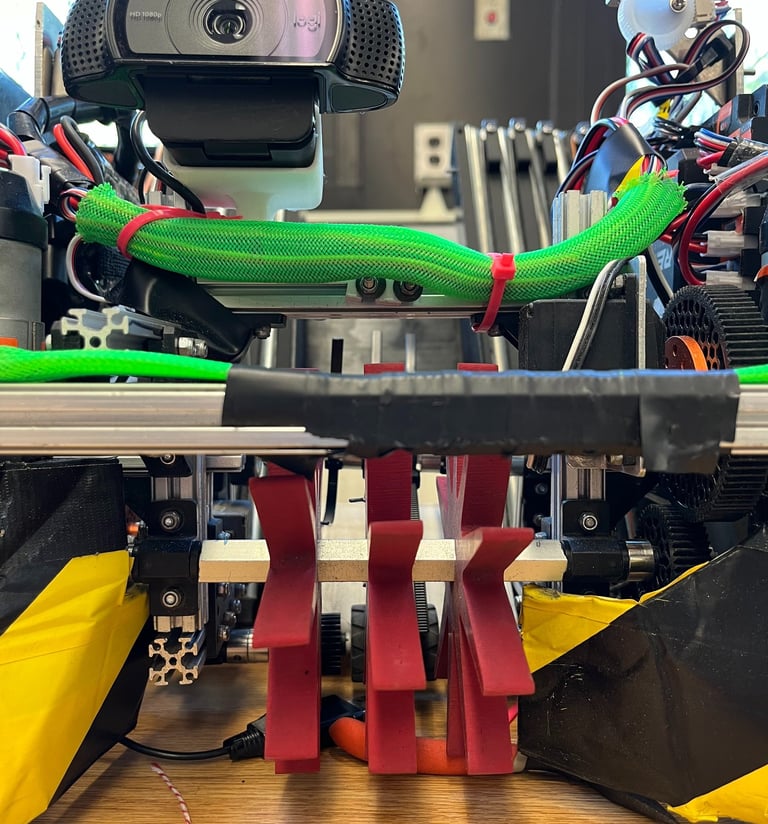
Outtake
Due to our previous outtake not being able to score on the backdrop, we opted for a different design that scores by touching the backdrop itself and sliding the pixel downwards. We did this by having the outtakes box pivot to its lowest point. To dispense the pixels accurately we added a pinching mechanism to grab the first pixel that gets put into the box. The second pixel waits on top of the first one to be delivered.
Plane Launcher
The robot's Plane Launcher was kept the same.



Chassis
The robot's Chassis was kept the same.
December 9th 2023 - January 13th 2023
(Qualifier 4 - Super Qualifier)
Robot Sub-Systems
Linear Slides
The robot's Linear Slides were kept the same.
Intake
The main portion of the robot's Intake was kept the same. However, we added a mechanism to pick up pre stacked pixels in the autonomous phase. We did this by using a servo to rotate a pincher downwards into the pre stacked pixels.
Outtake
The robot's Outtake was kept the same.
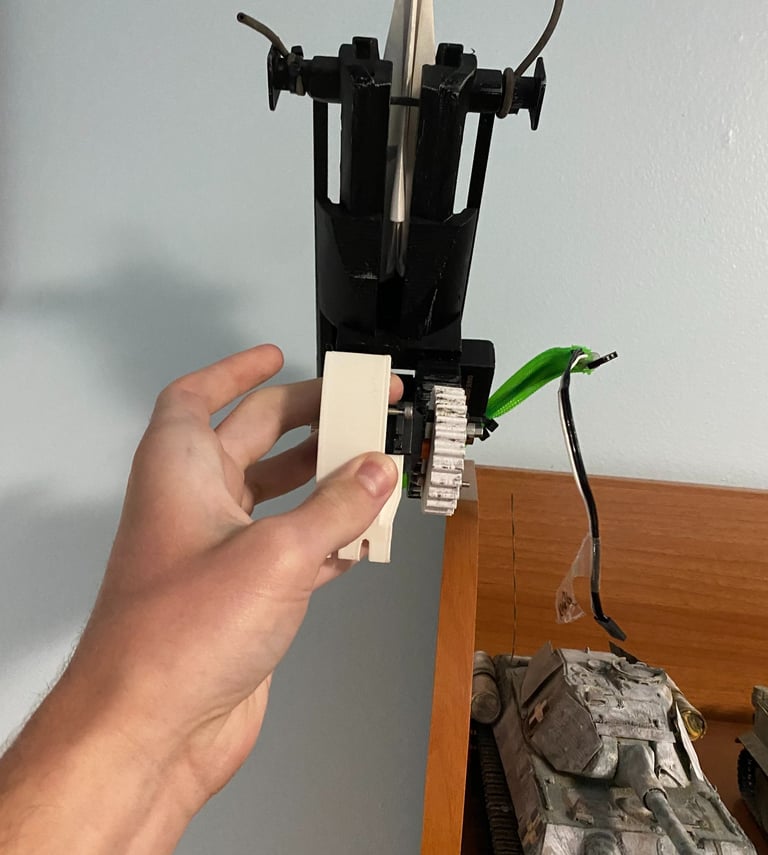
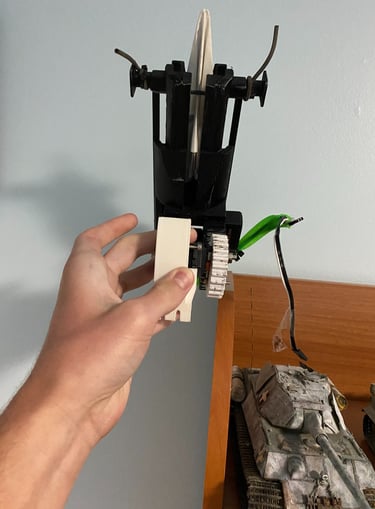
Plane Launcher
The launcher's mechanism was kept the same but the frame of it was changed to be more aesthetically pleasing.







Chassis
The robot's Chassis was kept the same.
December 9th 2023 - January 13th 2023
(Super Qualifier - State Championship)
Robot Sub-Systems
Linear Slides
The robot's Linear Slides were kept the same.
Chassis
The robot's Chassis was kept the same.
Intake
The robot's Intake was kept the same.
Outtake
The robot's Outtake was kept the same.
Plane Launcher
The robot's Plane Launcher was kept the same.


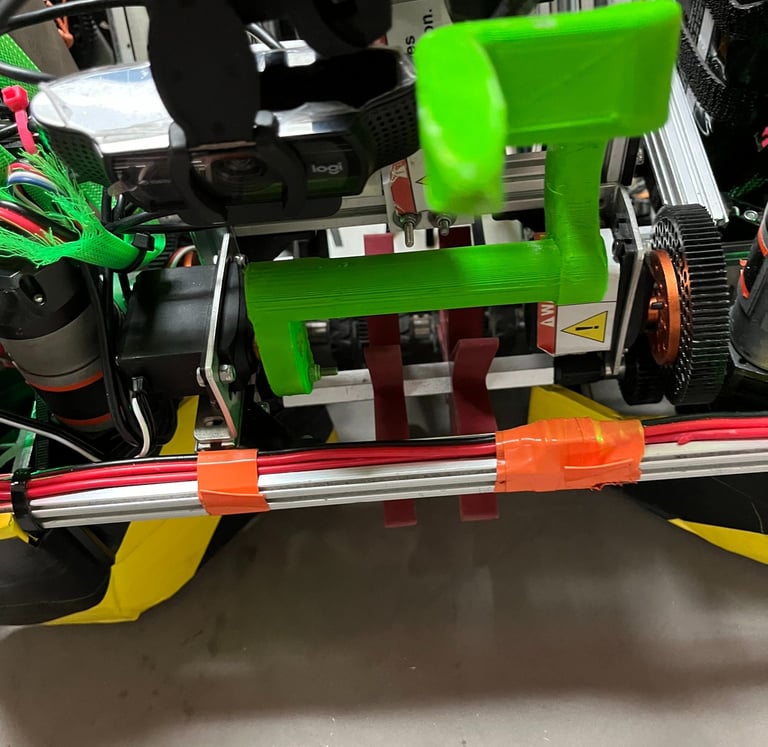
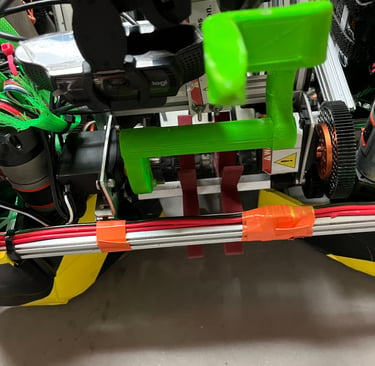
Climber
After going through a bunch of prototypes for a reliable climber we decided to go for a winch based climber. This mechanism is extremely fast, sturdy, and has enough torque to hold our robot up on the truss. The hooks of the climber are located on the left and right side of the robot and pivot towards the back of the robot. A string is attached to a hole close to the center of the hooks to allow for the hooks to lower downwards. A few rubber bands were placed on the back of the robot to allow for the mechanism to passively increase its height.