Overview
After losing the New York-NYC FTC CHAMPIONSHIP (2023-2024) and hearing about an off season event being held in the city, we decided to create a swerve drive based robot to compete in this competition. Swerve drives in FTC are almost unheard of due to their mechanical and software complexity. Swerve drives are the best drivetrain to use due to their ability to retain traction to the playing field while retaining omnidirectional motion, unlike other drivetrains. Mechanum and Omni wheel based drivetrains slip due to the roller wheels on the wheel itself not being able to retain traction to the playing field when in motion. Swerve drivetrains on the other hand retain traction and can accelerate extremely fast due to them not slipping when in motion and suddenly stopping. When developing a swerve drive there are 2 primary design choices you must make, whether you want to create a swerve drive where the wheel itself is powered by 2 motors acting as the drive and turning motors (differential) or powering the wheel using 1 motor and a servo to rotate the wheel (Coaxial). Most teams use a Coaxial swerve due to it being more simplistic than a differential. However, a Coaxial is extremely expensive due to the need for lots of small custom made parts and needing an additional 2 models. A differential swerve is more complicated to build due to it needing a perfectly circular wheel pod and gears that mesh with the pod itself. On top of this since the 2 drive motors steer the system it is a programming nightmare without the use of any encoders to track the robot's position.
This project is finished

Simple Swerve Prototype
After learning how differential swerve drives work, I decided to reiterate a design that has been around for quite a while. Award winning team FTC team 11115 Gluten free created a swerve drivetrain after their last year competing. After downloading the design I noticed major flaws including the way they rely on setscrews for 3D printed gears and the use of outdated shafts and motors. After looking at the design I wanted to simplify it while making it as cheap as possible for anyone to replicate. To do this I had to re design the most complicated part of the pod itself, the gearbox. This version uses the same mounting position for motors, wheel assembly, and, idle bracket. The only change that was made was with the way the gearbox was printed. Instead of using D-bore shafts to keep the gears straight this design uses M3x45mm bolts and bearings embedded inside of the 3D printed gears.
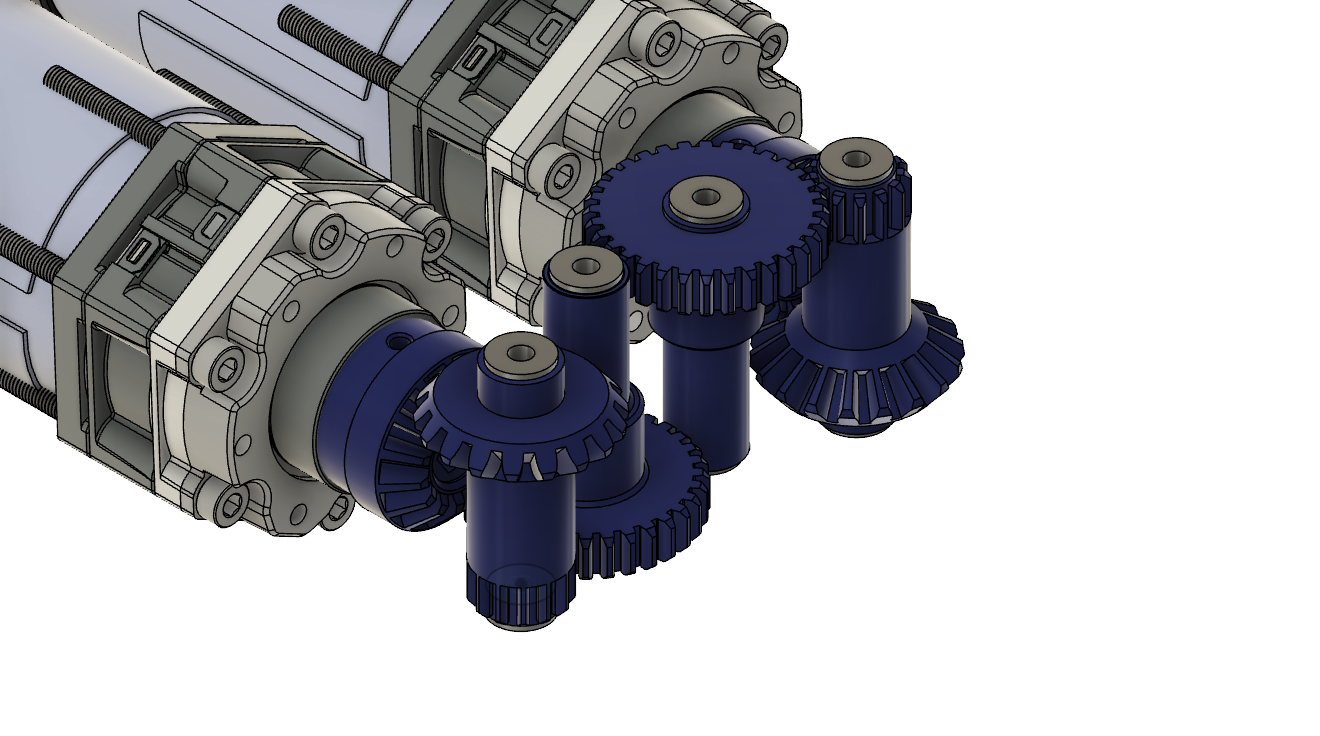
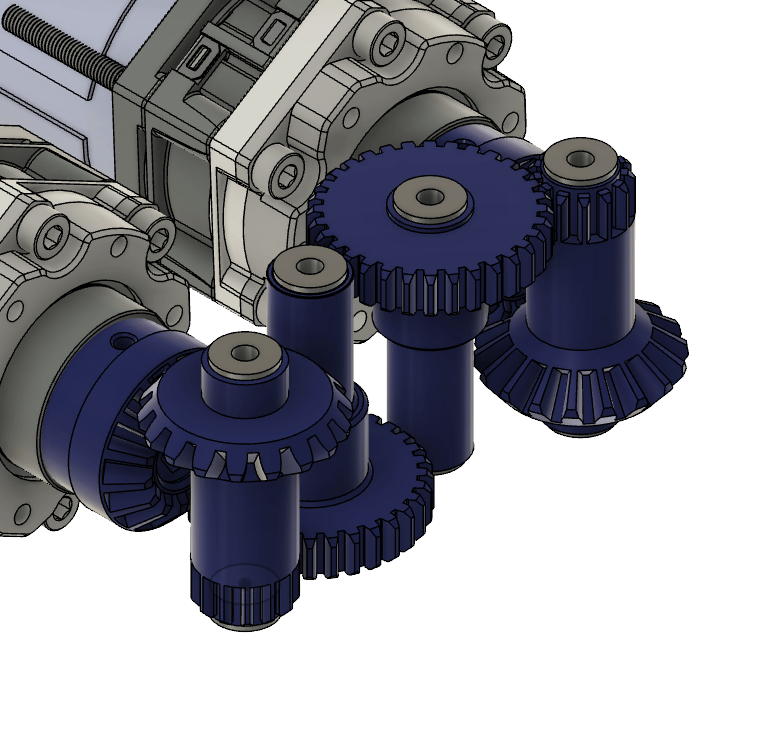

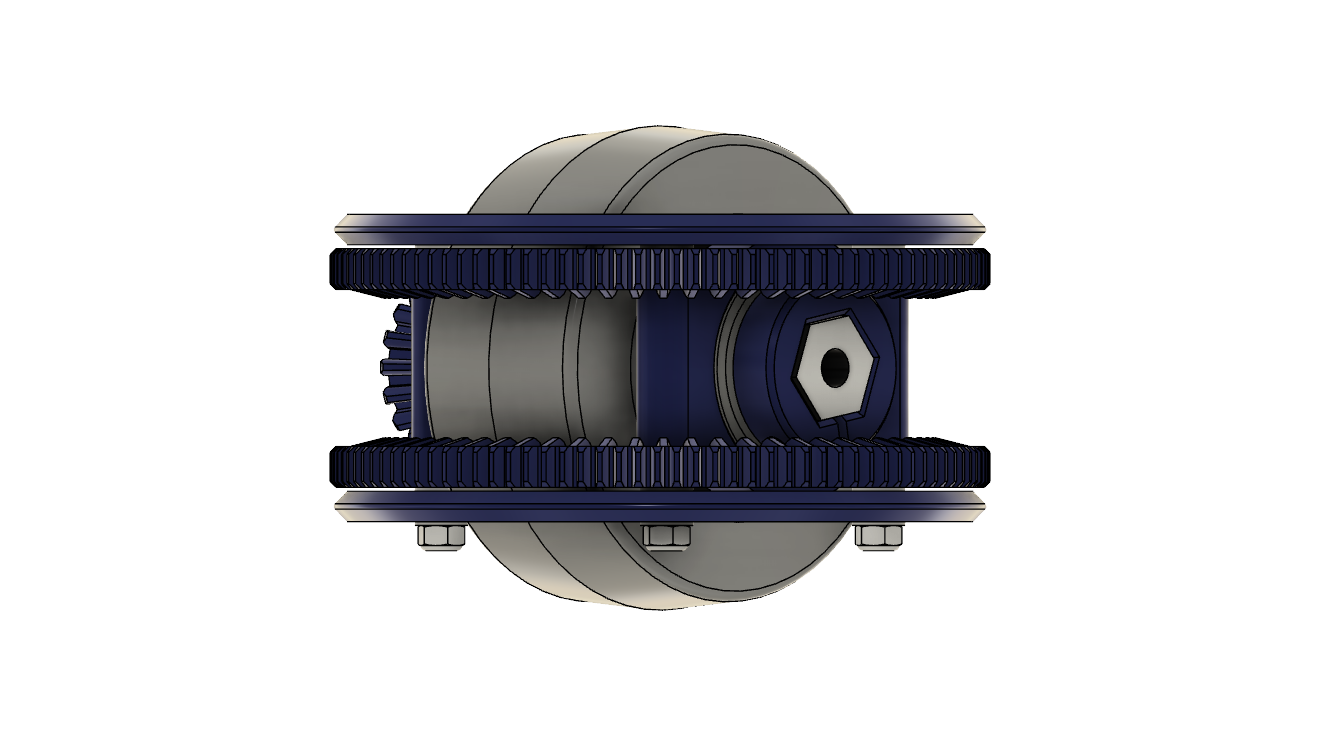

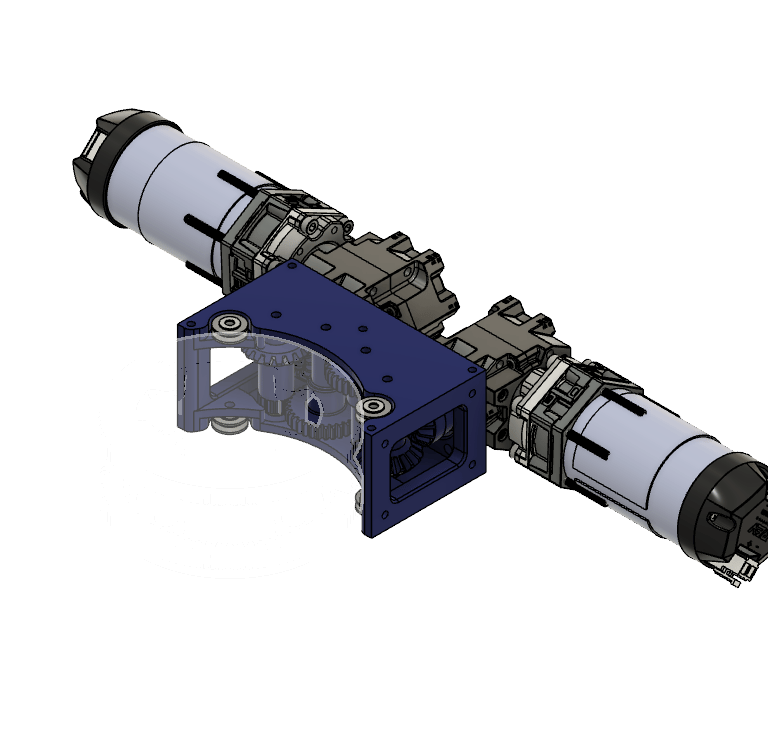
Simple Swerve V1
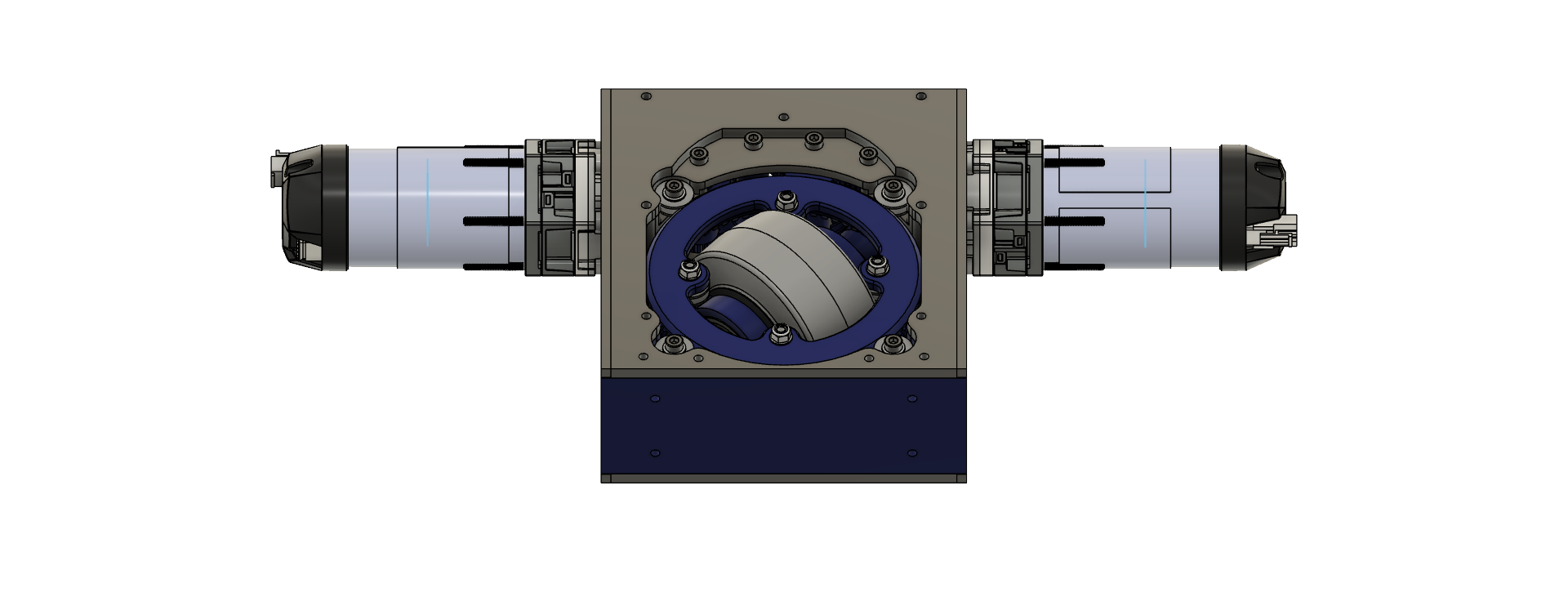
After reviewing the success of the prototype we noticed that the pods themselves would be too long to put inside of a FTC legal robot. The modules themselves stacked against each other are about 18.25 inches (with wires) long when the size limit is only 18 inches in length, width, and height. Due to this, I decided to rotate the motors 90 degrees by using a REV ultra 90-degree gearbox. This allows us to create a chassis that can be FTC legal while only changing the frame of the gearbox. The main issue with this design is that it uses an extra set of bevel gears which creates a loss of efficiency within the system.
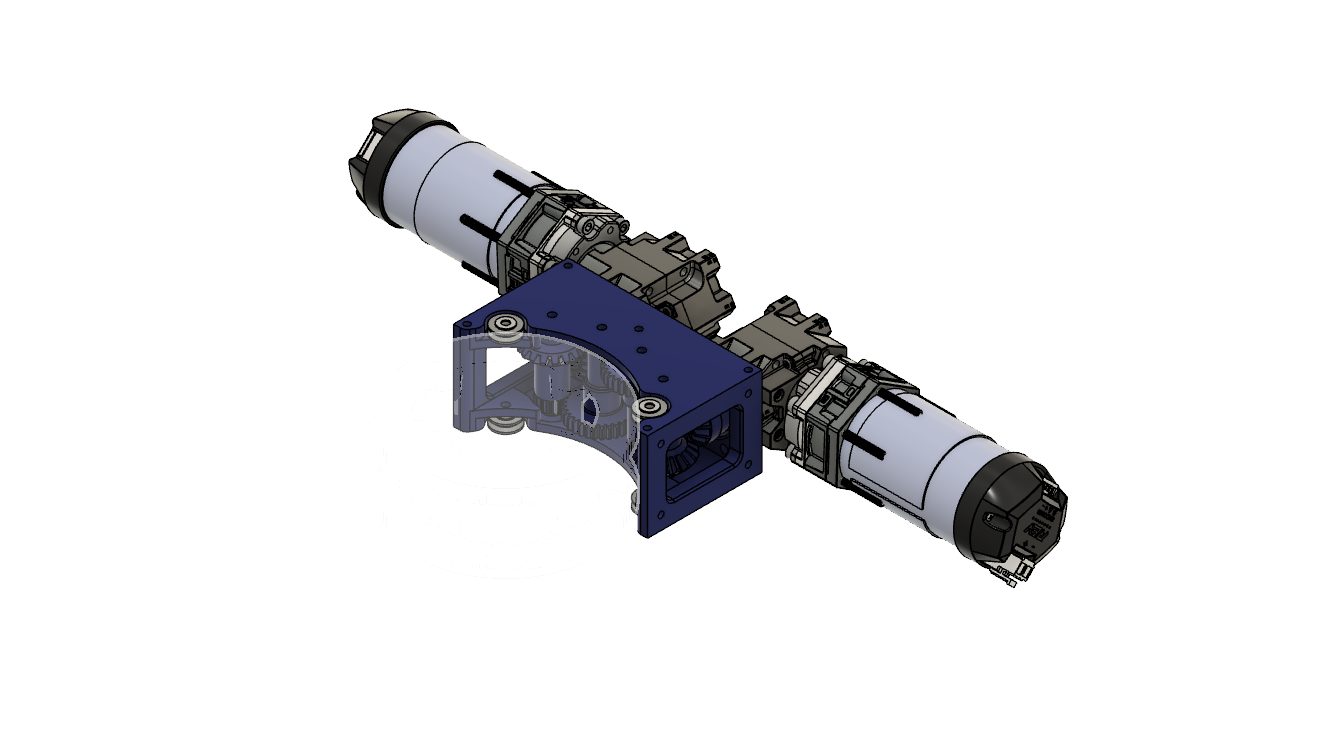

Simple Swerve Chassis
After finishing the first rendition of our swerve pods we decided to build a chassis for them. We used 2 pods for movement and 4 omni wheels on each corner of the chassis for stability. We also added cutouts for linear slides to make this chassis capable of playing in an offseason event. Sadly this event was canceled and the chassis was never used to compete.


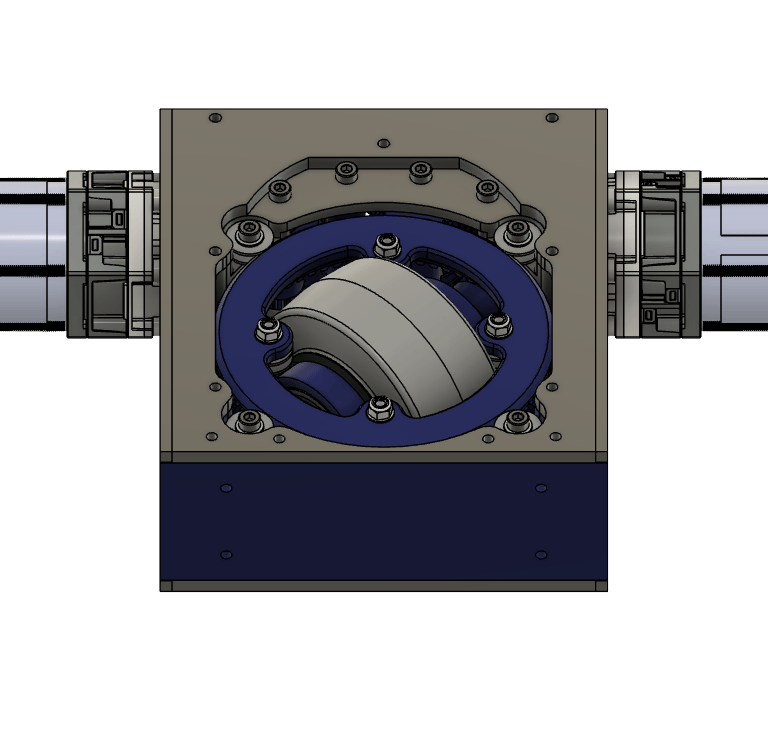
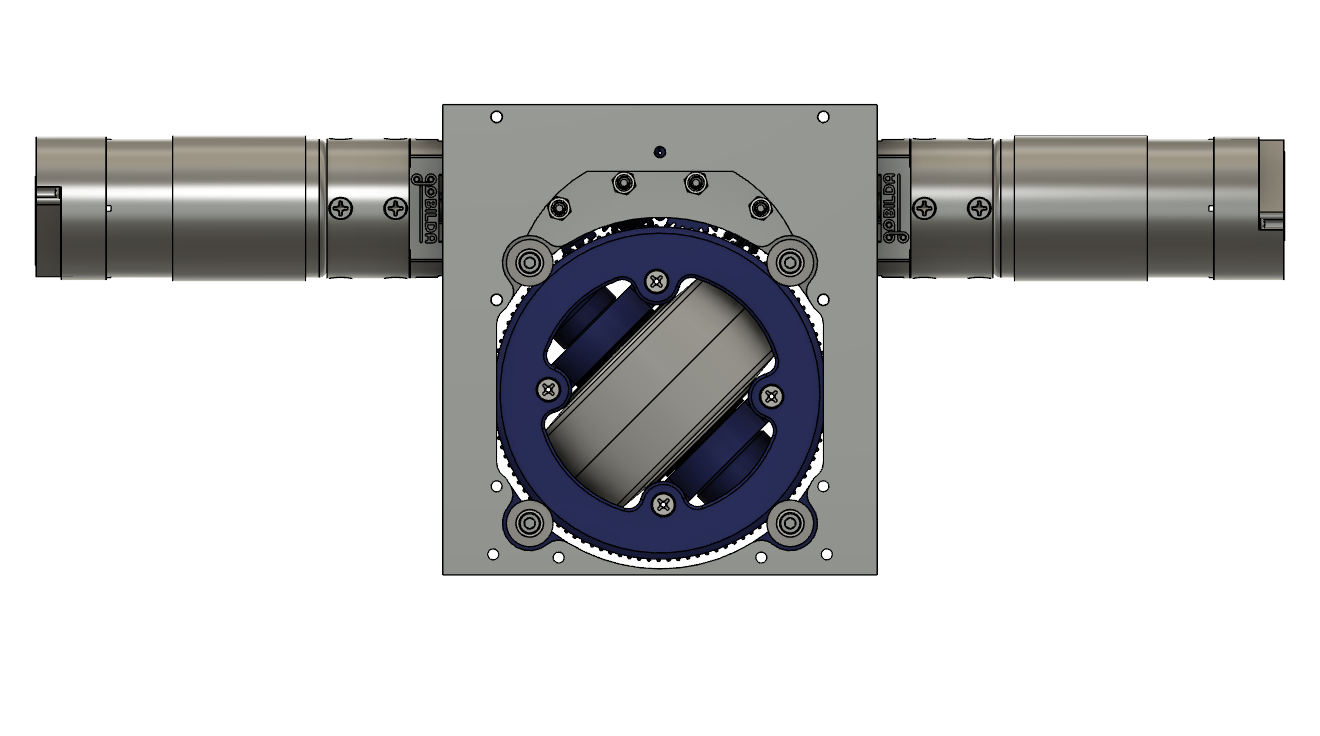
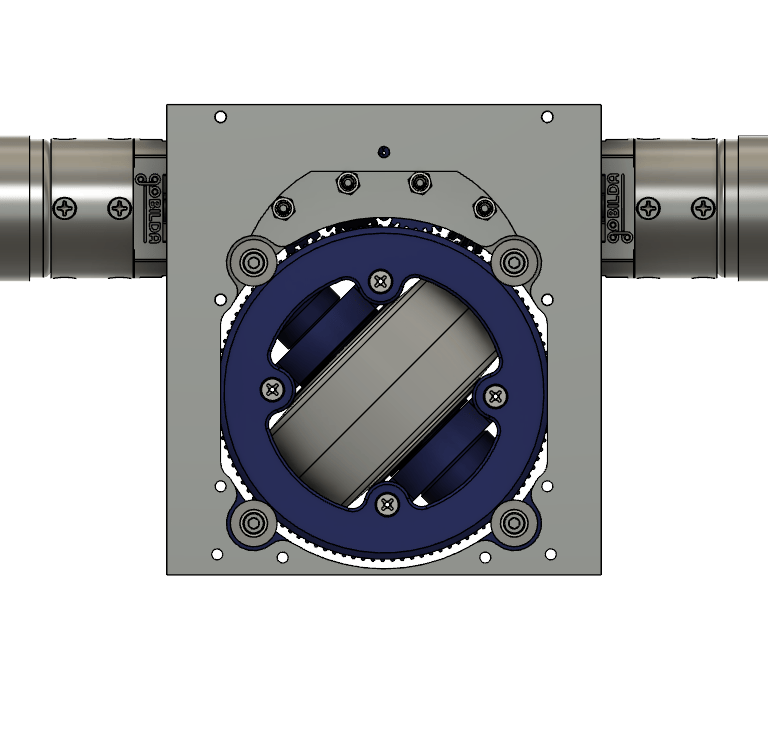
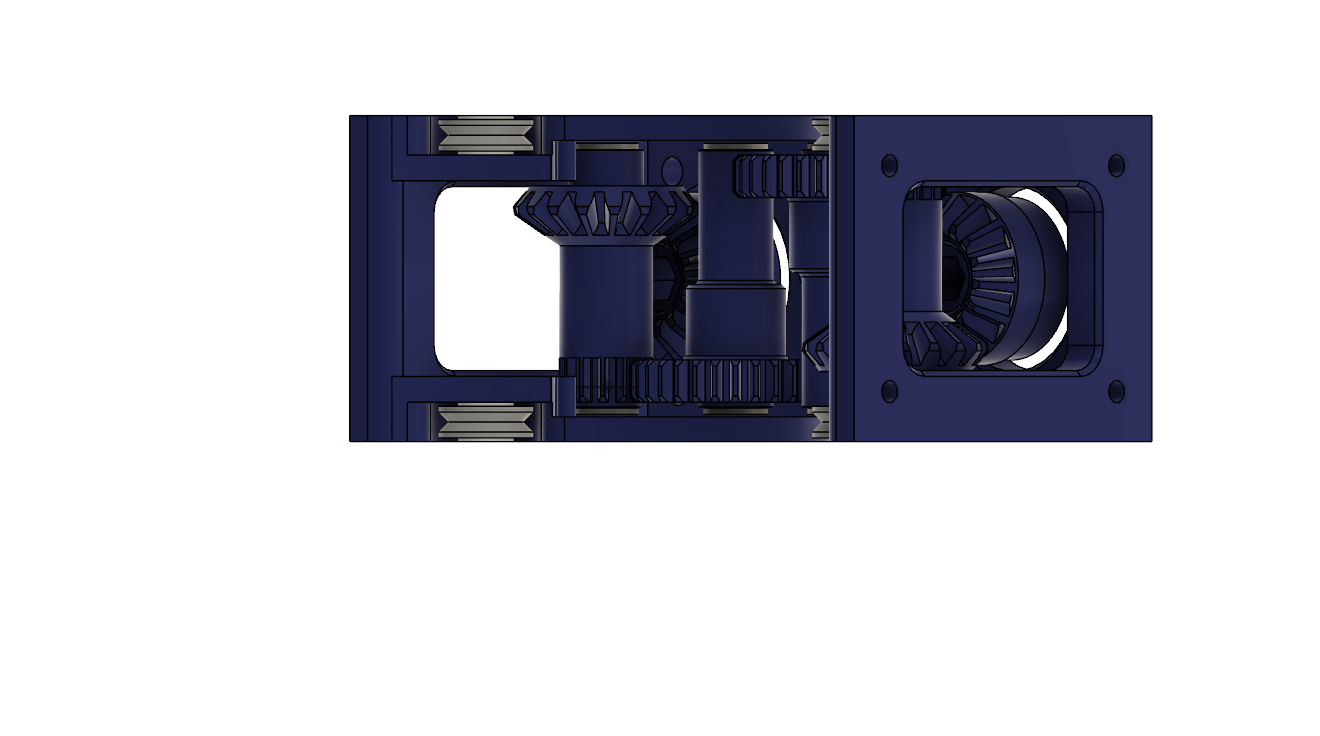
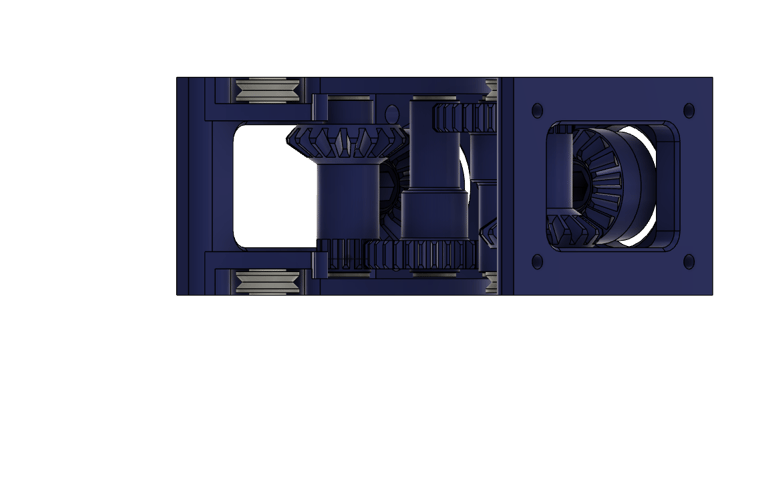
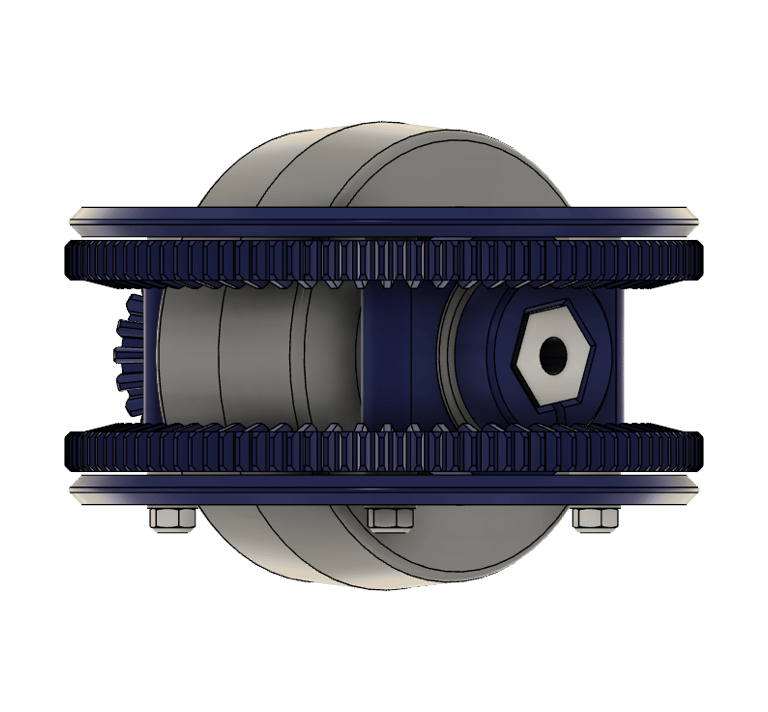
Simple Swerve V2
The new version of Simple Swerve shortens the bill of materials even further than the previous one and features 2 configurations. The first configuration uses 2 rev ultraplanetary motors while the second one uses 2 GoBilda yellowjacket 8mm REX motors. Aside from this, the rev configuration will not use ultraplanetary gearboxes allowing it to achieve a smaller form factor while using all of the same internal components. The only new parts are the gearbox's casing and the 2 side, top, and bottom plates.