Overview
Over the summer of 2023, I came up with an idea for a 3D printer. A delta based machine with closed loop stepper motors and an effector (delta toolhead) with extremely rapid cooling could allow for extremely fast, consistent, and accurate parts. The primary issue with a system like this is the complexity that comes with building and programming a delta machine. This style of a 3D printer does not use an X, Y, and Z axis, instead, it uses 3 arms attached to 3 vertical posts arranged in a triangle. The printer arms themselves can only move vertically meaning that the 3 arms themselves move the effector in the X, Y, and Z axis by moving each arm independently. Due to this, it will print on a circular build volume to maximize the amount of surface area the tool head can print on.
The printer I will work on uses the frame, power supply, and solid state relay (110V bed heater) from a pre existing printer known as the TEVO Little Monster. I will create a custom effector, Nema 17 closed loop stepper motors, touch screen, and belt tensioners. This will allow for accurate prints without any visual issues.
This project is finished and the printer is scrapped
Effector V1
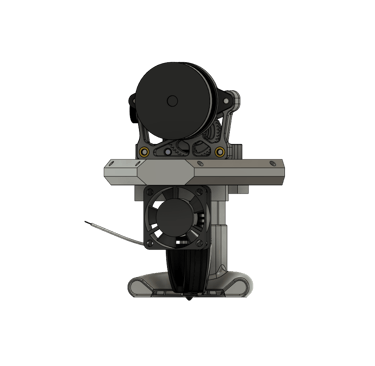
The first effector design is a proof of concept to see if a Bowden extruder will be optimal even though there is a very long filament path. Due to this style of printer needing as little weight as possible on the effector, a Bowden setup seems to be the best since it will remove the weight of an extruder on the effector. However, due to the very long Bowden tube, there is less control over the filament due to friction within the tube. This led to inconsistent extrusion and artifacts when printing. Aside from the extruder, the 5015 fan had issues bowing consistent air down the duct due to the curves within the design. Due to this, the next design will use a direct drive extruder and a more powerful part cooling fan.

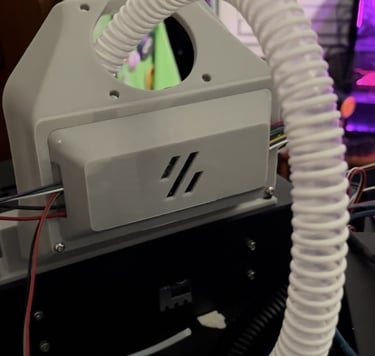
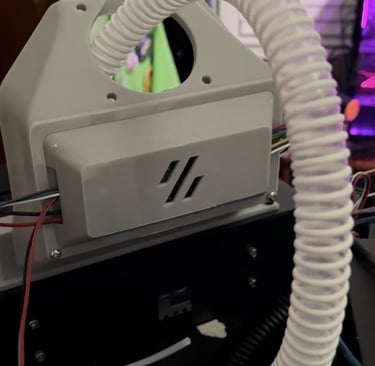
CPAP Fan
Instead of a fan mounted on the toolhead of a printer, a CPAP fan is mounted to the back of the printer and uses a hose to route the airflow to the part cooling fan ducts. This lowers the weight of the effector and slims down the space on the effector since I do not need to add a fan to the effector.
Effector V2
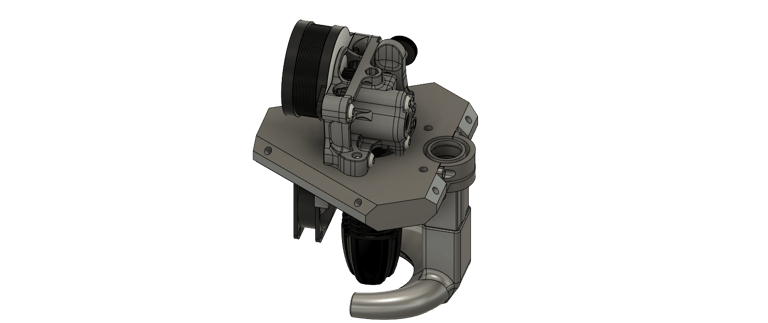
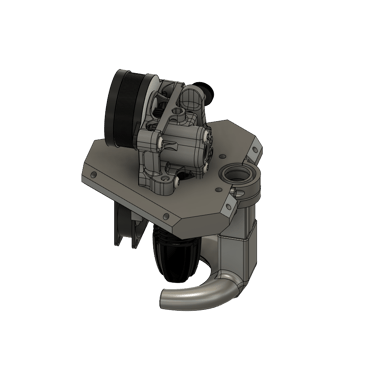
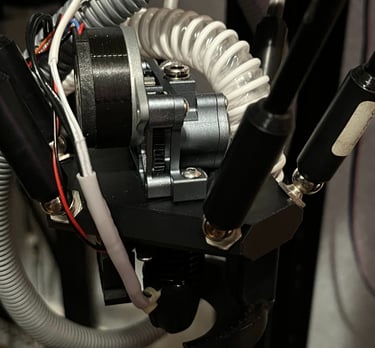
On the new effector, I integrated the part cooling ducts, hotend mount, extruder mount, and bed leveling mount into one part. This new effector supports an auto bed leveling probe to automatically calibrate the printer arms, the toolhead's minimum position, and how flat the bed is. A direct drive extruder is added for more consistent extrusion, a new hotend that can achieve a higher flow rate and faster heating through the use of the more efficient heater, larger melt zone, and bigger nozzle. On top of this, I added a CPAP fan to the frame of the printer and an attachment for the hose on the hotend. These upgrades did improve print quality but the probe on the effector was giving inconsistent readings due to it not being exactly on the nozzle. The integrated fan ducts were also not cooling the parts properly due to it not concentrating the flow of air onto the tip of the nozzle.
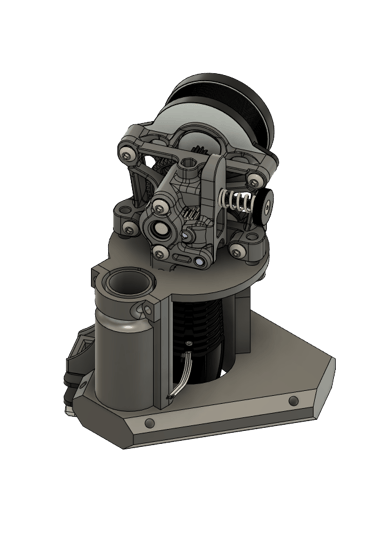
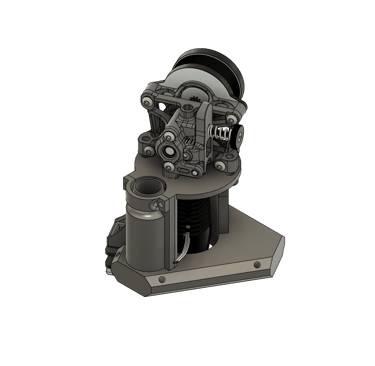

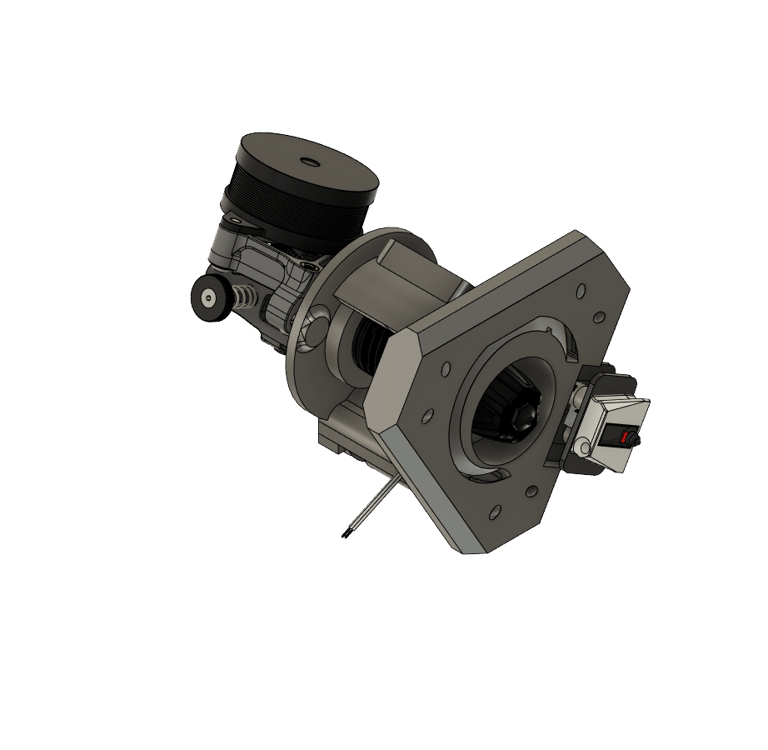
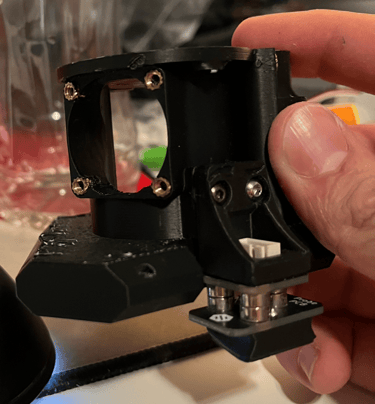
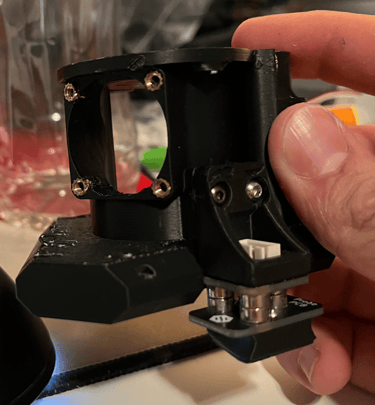
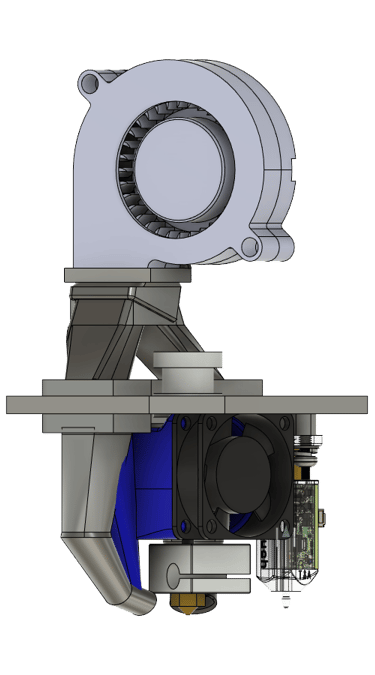
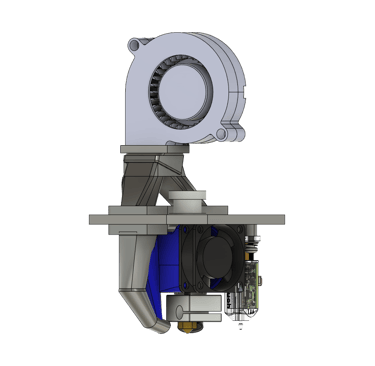
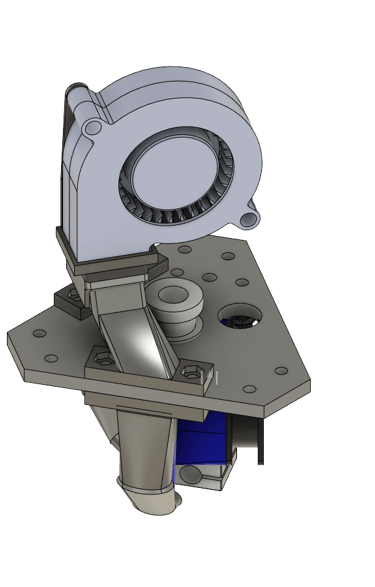
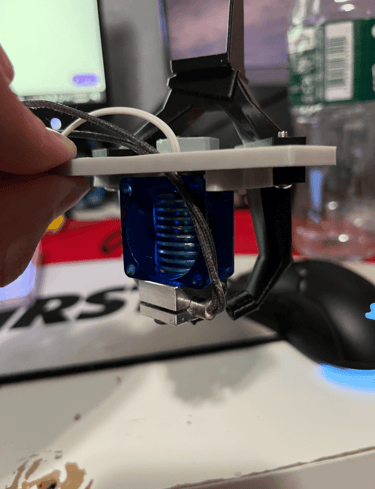
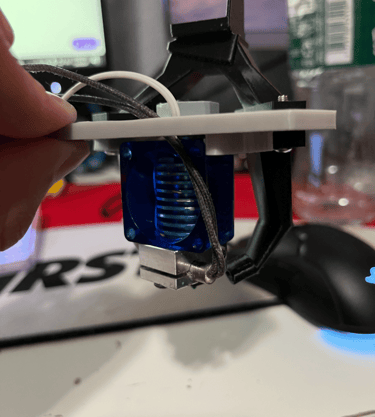
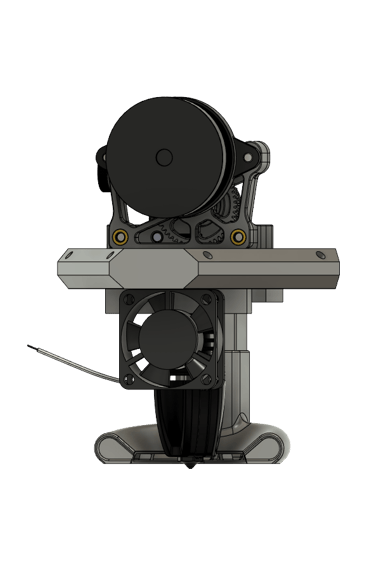
Effector V3
On this new effector, I kept the same parts aside from the probe and changed the way everything was mounted. I moved the hotend to the bottom of the effector and placed the extruder slightly above the hotend. This lowered the center of gravity in the system. On top of this, I used new fan ducts to concentrate air to the tip of the nozzle allowing for consistent airflow. The new probe is a membrane switch that can attach to the nozzle's tip, allowing the printer to probe with the nozzle. This probe gets removed and put onto the nozzle whenever it is needed for calibration.
Closed Loop Stepper Motors
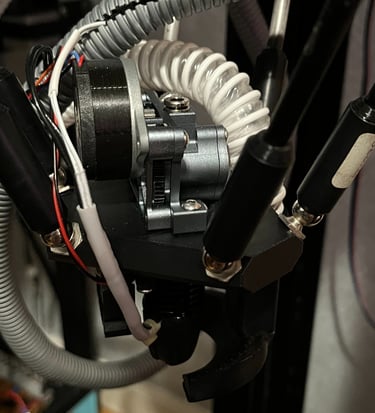
Closed loop stepper motors are stepper motors with an encoder to track the shaft's absolute position, turning this motor into a servo motor. This allows the printer to run more smoothly, have a lower resonance than stepper motors, and never have step loss. I bolted these motors into the pre existing Nema17 stepper motor plates. In my case, the motor's PCB interacts with a stepper driver that powers the PCB. The stepper driver I am using mimics an A4988 stepper driver to take in information from the motherboard while the PCB itself sends the information to the motor and checks if the motor's poison is perfect using the encoder.

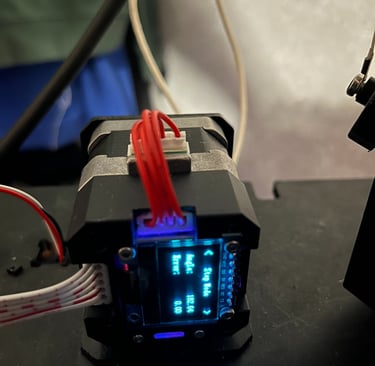
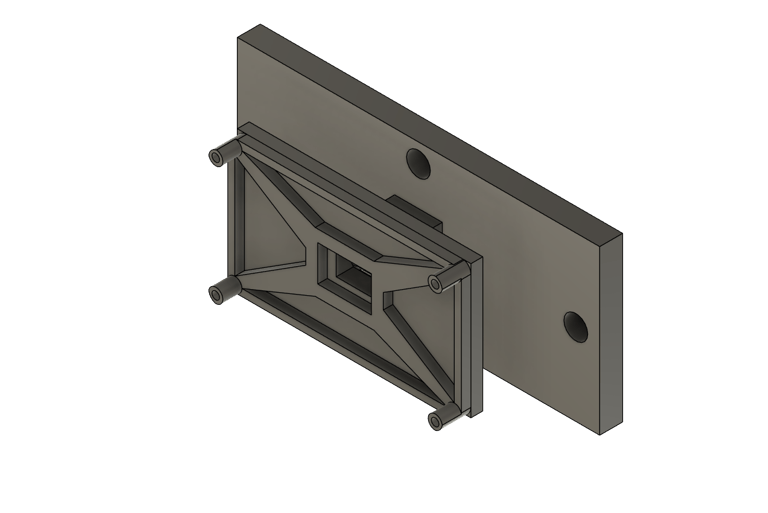
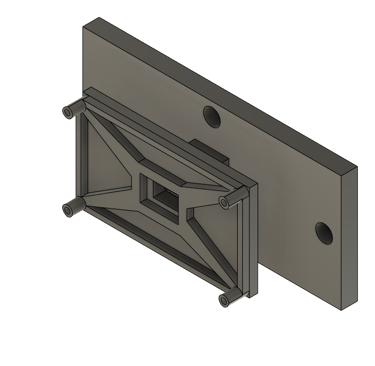
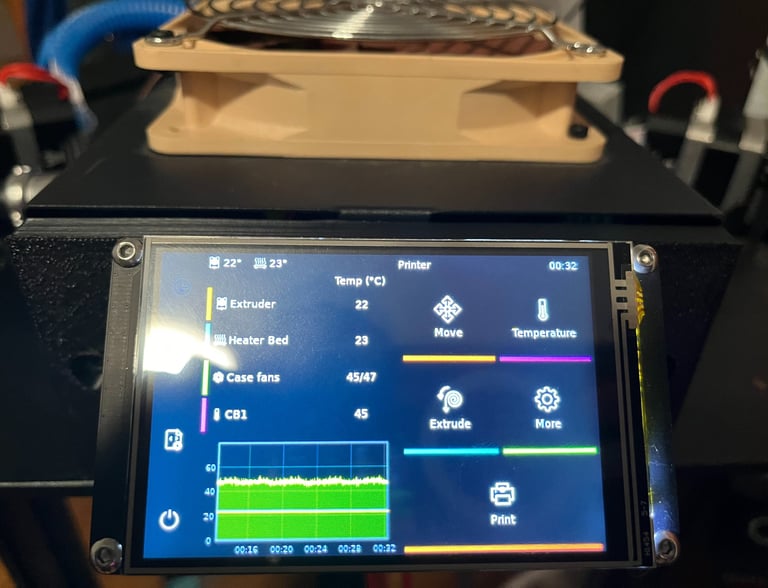
Touch Screen Interface
The touchscreen interface for this printer is run on a TFT35. This screen allows me to host a process known as Klipperscreen to mimic the functionality of the web interface I run on my computer. This screen is bolted onto the electronics box and can pivot ~75 degrees upwards and downwards. The frame of the screen is bolted onto the pre existing electronics enclosure.