Overview
Beginning on September 10th, 2022 I was appointed to be on FTC team 9384 by my (at the time) lead mentor Mr. Dispenza, and the following months involved building a robot to play the 2022-2023 FTC game POWERPLAY. This game consisted of placing little cones on top of yellow poles and taped off sections on the playing field. Depending on where your robot places the cone, a set amount of points will be given to that robot's alliance. Once the match is over, bonuses are given out depending on whether the robot completed certain tasks properly. During this build season, our robot went through 3 major iterations. The final CAD of the robot can be found by clicking the GrabCAD icon below.
This project is finished

September 10th 2022 - December 4th 2022
(Kickoff - Qualifier 4)
Robot Sub-Systems
Linear Slides
Due to this year's game having elevated scoring positions, we needed to come up with an idea for how we could score on each portion of the field. Due to this, we used a linear slide. The one we opted for is the Rev Robotics linear slide kit due to its simplicity, price, and effectiveness. This version of the robot had one slider with an intake attached to the bottom of the final stage to allow us to intake a cone. The only issue with this linear slide is that when at its max extension if the robot moves, the linear slide sways leading to the cone dropping.
Chassis
The chassis of the robot is relatively simple. We decided to use mecanum wheels to allow for omnidirectional movement. The wheels were attached to motors mounted onto aluminum C-channels using metal L brackets. The C-channels themselves were positioned in the shape of an H to allow for the chassis to stay square. Our chassis design was based on the Rev Robotics Mechanum Drivetrain Kit. After assembling the chassis we bolted the rest of the mechanisms onto the chassis itself.
Intake
Since we needed to intake and outtake the cone on different elevations, we came up with a design that allowed for a smooth intaking process and the ability to grip onto the cone very well. We did this by using 2 compliant wheels attached to 2 servo motors with a small amount of room between the wheels to allow for the cone to stay locked between the 2 wheels when the cone is in the center of the mechanism. The main issue with our intake is maintaining the cone inside of it without the cone falling.




December 4th 2022 - February 12th 2023
(Qualifier 4 - Super Qualifier)
Robot Sub-Systems
Linear Slides
The Linear Slides themselves were kept the same. However, we reduced the gear ratio of the motor on our linear slides. This allowed us to speed up the process of lifting.
Chassis
The robot's Chassis was kept the same.
Intake
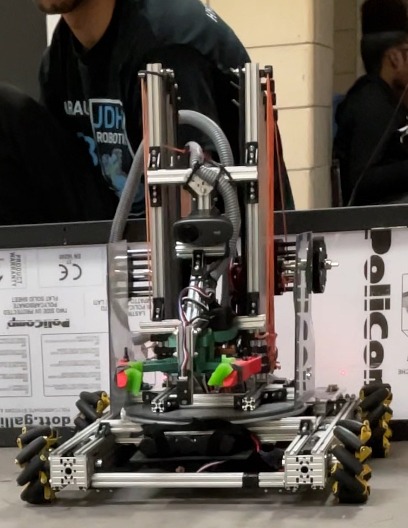
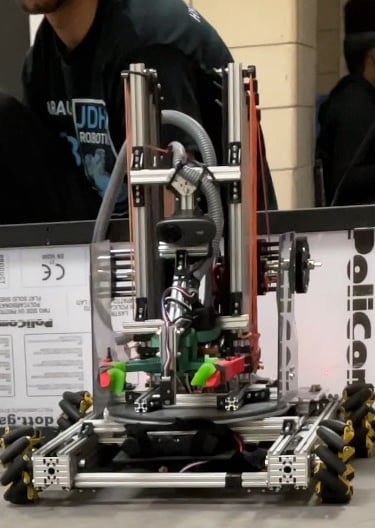
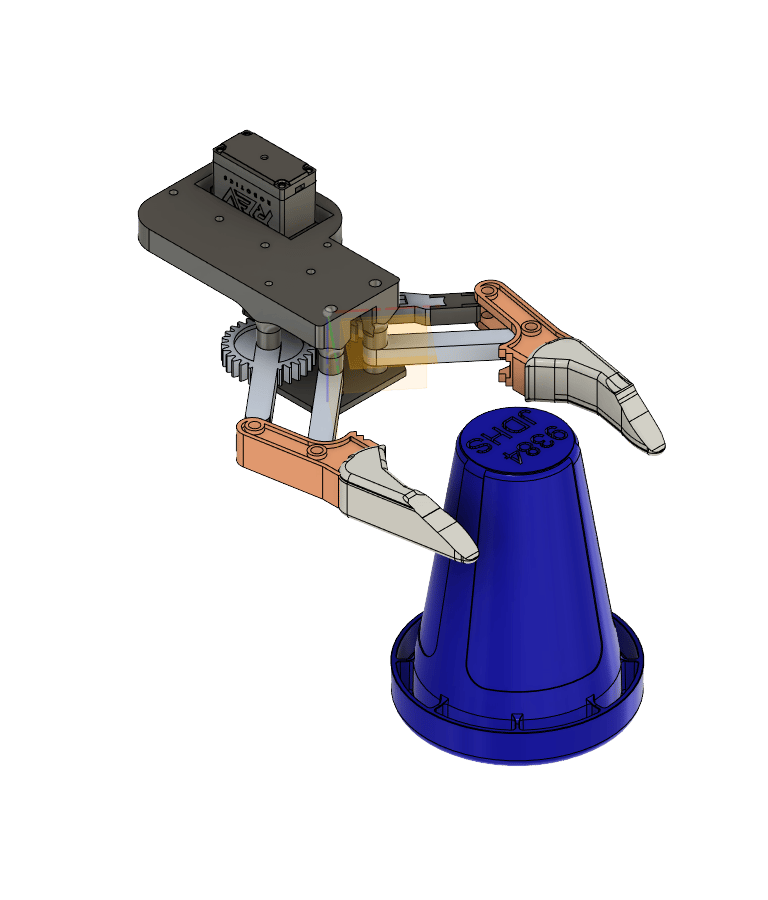
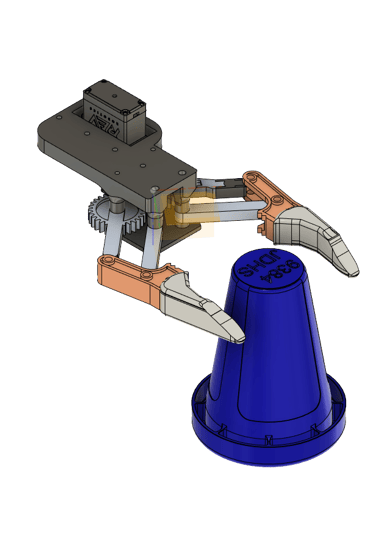
Due to the design of our old intake not allowing us to consistently maintain cones in an upward position when intaking, we decided to re think how we could intake cones. During this time a claw based design seemed to be the best idea we could come up with. This claw ended up being perfect for our use case.
Turret
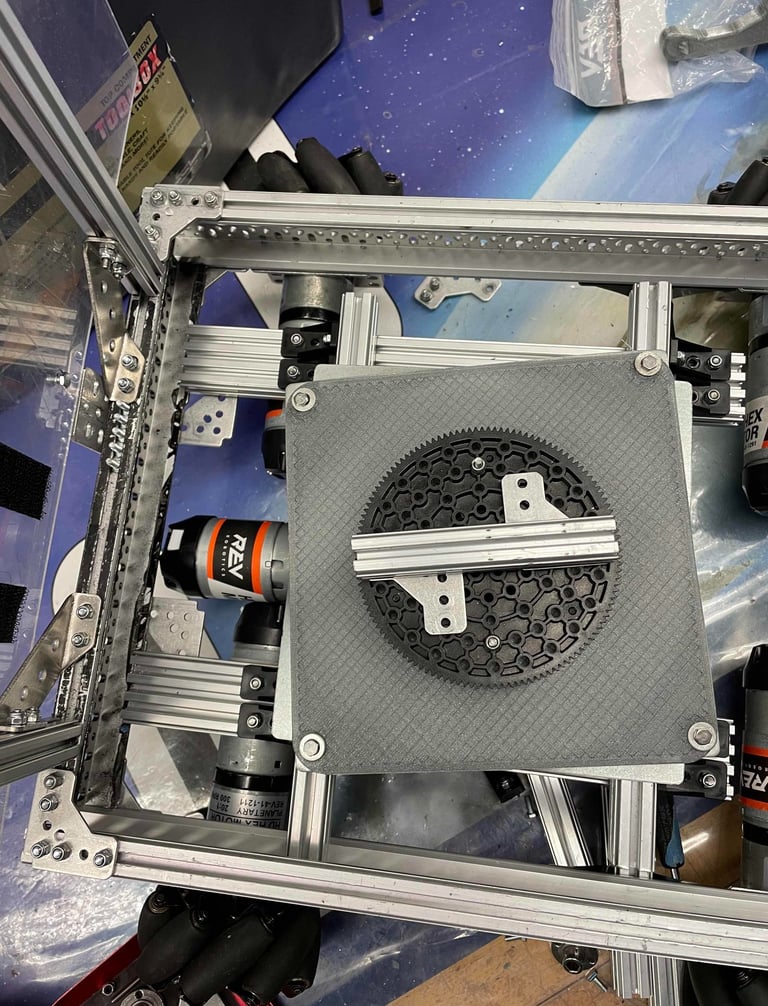
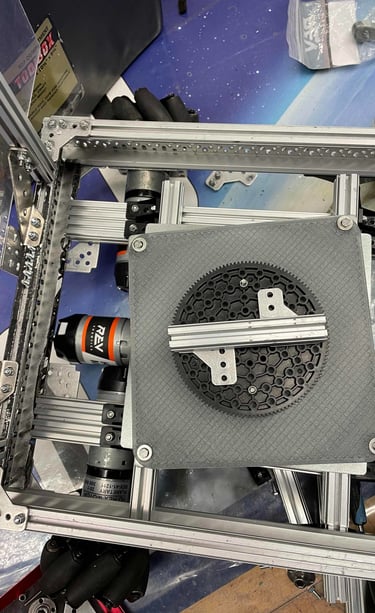
When brainstorming ideas on how we could improve our robot's functionality, we noticed mobility was a major issue with our robot. When we needed to score on poles the chassis of our robot wasn't aligned with, we were unable to. Due to this removing the need to turn the chassis when scoring is optimal for us to score quickly. We did this by creating a turret based design that is directly driven by a motor. To my knowledge, a turret designed like this was never done before since the motor shaft needs to be in the center of the lazy susan.
December 4th 2022 - February 12th 2023
(Super Qualifier - State Championship)
Robot Sub-Systems
Linear Slides
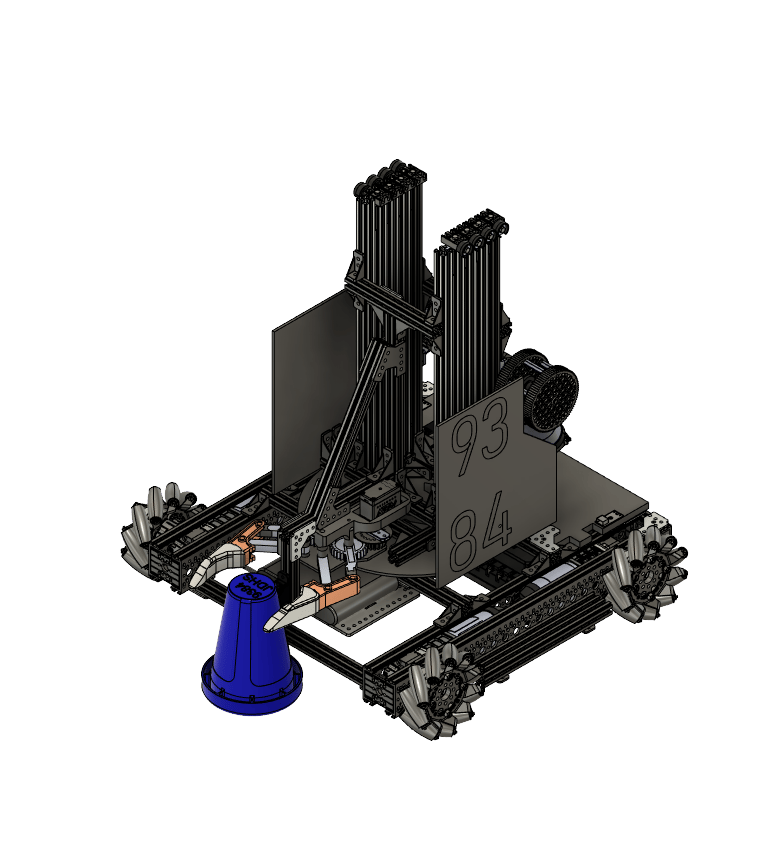
The Linear Slides themselves were kept the same. However, we added a second slider to increase the rigidity of the robot itself due to the linear slides swaying when it is at its maximum extension. Adding another slider squared the whole system.
Chassis
The Chassis of the robot was completely revamped. Instead of the motors poking towards the inside of the chassis, we added 90-degree gearboxes (bevel gears) to put the motors themselves inside of the pre existing C-channels on all 4 chassis motors. This allowed for the chassis to be lower since the center of the wheel would rest in the center cut out hole of the C-Channel. On top of this, more support beams ran across the base of the chassis to distribute and square the frame of the chassis better to compensate for a bigger turret.
Intake
The robot's intake was kept the same.
Turret
Due to how small the lazy Susan was, we decided to upgrade to a bigger circular one to allow for more surface area. This bigger lazy Susan allowed for our robot to fit 2 linear slides for added rigidity.