Problem:
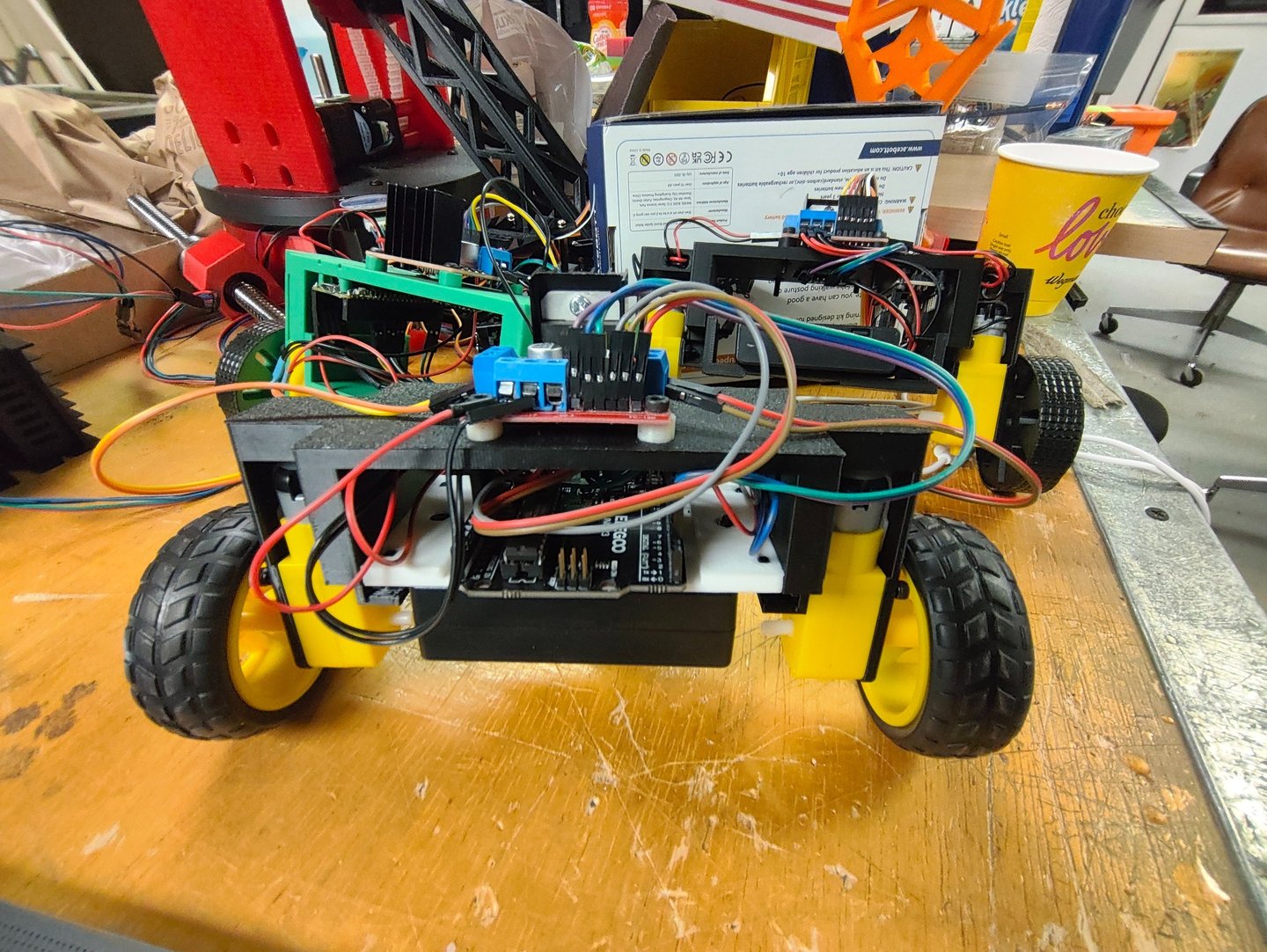
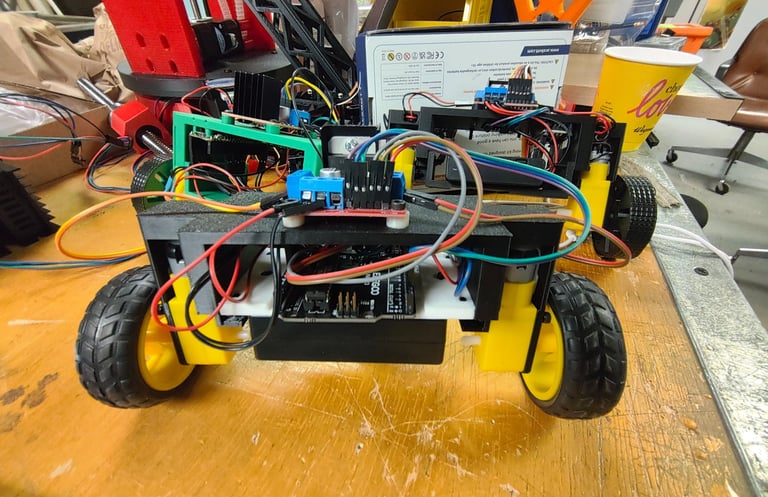
Create a self balancing robot using parts the school already has.
Method:
Designed and built three different self balancing robot systems using a gyroscope for continuous tilt detection and balance correction.
Developed one robot using a Raspberry Pi running Python for real time sensor processing and motor control.
Developed two additional robots using Arduino Nano and Arduino Uno R3 microcontrollers for lightweight embedded balancing control.
Implemented closed loop PID balancing algorithms to continuously adjust motor output and maintain upright stability.
Integrated motor drivers and DC motors already available in the lab, reducing overall project cost and eliminating the need for specialized hardware.
Developed custom software handling:
Gyroscope data processing.
Real time angle calculation.
PID balance control.
Motor speed synchronization.
Stability correction during movement and external disturbances.
Tuned PID values through repeated testing to improve response time, reduce oscillation, and maintain stable balancing performance across all three systems.
Optimized chassis layout and center of gravity placement to improve balance recovery and overall stability.
Built compact electronics systems including:
Raspberry Pi controller.
Arduino Nano controller.
Arduino Uno R3 controller.
Motor driver boards.
Gyroscope modules.
Rechargeable battery systems.
Dual DC drive motors.
Result:
Successfully achieved autonomous self balancing using real time gyroscope feedback and software based control.
Demonstrated stable forward, backward, and stationary balancing behavior across multiple hardware platforms.
Reduced project cost by utilizing existing school components and widely available electronics.
Improved understanding of PID control systems, embedded programming, and real time robotics development.
Demonstrated how balancing robotics can be implemented across both microcontroller and single board computer platforms.
Created flexible robotics platforms suitable for future expansion into autonomous navigation and advanced robotics applications.
Click the photo to find out more!
Self Balancing Robot

Problem:
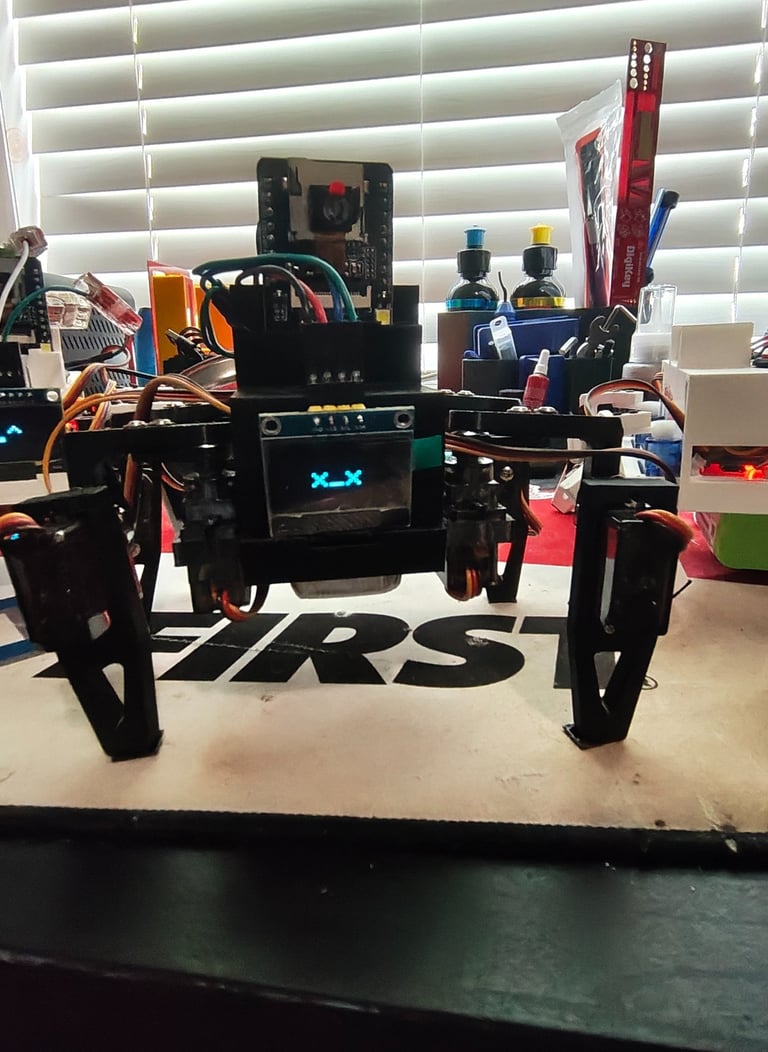
Build walking robots to teach ESP32 programming, sensors, and servo breakout boards.
Method:
Built 3 compact crawling robots using 2 servos each.
Added ESP32 CAM for wireless control and video.
OLED used for system status display.
Servo driver simplified wiring and control.
3D printed lightweight frames.
Wrote custom code for gait, control, and display.
Tuned walking for stability.
Result:
All robots walked stably with minimal hardware.
Lower cost and simpler design.
Wireless control and live feedback working.
Clear real time status display.
Scalable educational robotics platform.
Click the photo to find out more!
Crab Crawler